|
Вопросы безопасности
Правильная ссылка на статью:
Шевчук Д.В., Ермаков С.В. Целеполагание для развития адаптивной системы оценки текущего и прогностического значений скоростного проседания судна // Вопросы безопасности. 2025. № 4. С. 1-14. DOI: 10.25136/2409-7543.2025.4.75846 EDN: YHYUVH URL: https://nbpublish.com/library_read_article.php?id=75846
Целеполагание для развития адаптивной системы оценки текущего и прогностического значений скоростного проседания судна
Шевчук Данила Владимирович
ORCID: 0009-0003-7861-5005
аспирант; кафедра судовождения и безопасности мореплавания; ФГБОУ ВО "Калининградский государственный технический университет"
236035, Россия, Калининградская обл., г. Калининград, ул. Молодёжная, д. 6
Shevchuk Danila Vladimirovich
Postgraduate student; Department of Navigation and Maritime Safety; Kaliningrad State Technical University
6 Molodezhnaya str., Kaliningrad, Kaliningrad region, 236035, Russia

|
schevchuk.dan@yandex.ru
|
|
 |
|
Ермаков Сергей Владимирович
ORCID: 0009-0009-7814-8877
кандидат технических наук
доцент; кафедра судовождения и безопасности мореплавания; ФГБОУ ВО "Калининградский государственный технический университет"
236035, Россия, Калининградская область, г. Калининград, ул. Молодёжная, 6
Ermakov Sergey Vladimirovich
PhD in Technical Science
Associate Professor; Department of Navigation and Maritime Safety; Kaliningrad State Technical University
6 Molodezhnaya str., Kaliningrad, Kaliningrad region, 236035, Russia
|
|
esv.klgd@mail.ru
|
|
 |
Другие публикации этого автора
|
|
|
DOI: 10.25136/2409-7543.2025.4.75846
EDN: YHYUVH
Дата направления статьи в редакцию:
10-09-2025
Дата публикации:
22-09-2025
Аннотация:
Объектом исследования является навигационная безопасность плавания судна. Предмет исследования – скоростное проседание судна на мелководье. Цель исследования – формирование перечня задач, подлежащих решению для эффективной реализации концепции адаптивной системы оценки текущего и прогностического значений скоростного проседания судна, и краткое описание содержания этих задач. Авторы доступно описали физику влияния мелководья на движения судна и, в частности, скоростного проседания, представили состав указанной выше системы, в который входит трёхантенный спутниковый компас, ЭКНИС, эхолот и основной блок, а также алгоритм работы системы, сформировали перечень из пяти задач для дальнейшего развития системы. В рамках решения последней задачи, связанной с оценкой и выбором нейросети, авторами сформулированы требования к этому инструменту, приведена одна из классификаций нейросетей и предложена архитектура нейросети для её интеграции в адаптивную систему оценки текущего и прогностического значений скоростного проседания судна. Методологической основой исследования являются эксперимент и измерение. Однако в работе представлены не результаты исследования, полученные этими методами, а проведена постановка задач, подлежащих решению с их использованием. При обосновании концепции адаптивной системы оценки значений скоростного проседания судна были использованы такие методы научного исследования, как анализ, синтез, индукция и дедукция. Новизна исследования заключается в обосновании концепции адаптивной системы оценки текущего и прогностического значений скоростного проседания судна, в аппаратную часть которой среди прочего входит такое техническое средство, как трёхантенный спутниковый компас. В результате исследования выявлено, что современная методология определения скоростного проседания не содержит абсолютно достоверных и универсальных методов, способов или алгоритмов. Вместе с тем, предложенная на уровне концепции система также пока ограничена в своём развитии вследствие отсутствия чёткого понимания дальнейшего направления исследования и связанного с ним комплекса задач, подлежащих решению. В целях устранения этого пробела сформулирован перечень первичных задач для эволюции и становления адаптивной системы оценки текущего и прогностического значений скоростного проседания судна, часть из которых предполагает проведение натурных экспериментов.
Ключевые слова:
экономическая безопасность, экологическая безопасность, навигационная безопасность, скоростное проседание, запас глубины, вычисление, прогнозирование, система, нейронная сеть, архитектура нейросети
Abstract: The relevance of the study is due to the need to create a universal reliable valid accurate method for determining the vessel's squat, since all existing methods, techniques, algorithms, formulas are limited in use and do not fully possess all the specified characteristics. The object of the study is the navigational safety. The subject of the study is the vessel's squat in shallow water. The purpose of the study is to form a list of problems to be solved for the effective implementation of the concept of an adaptive system for assessing the current and predicted values of the vessel's squat, and a brief description of the content of these problems. The methodological basis of the study is experiment and measurement, although the work directly presents not the research results obtained by these methods, but the formulation of problems to be solved using them. When substantiating the concept of an adaptive system, such scientific research methods as analysis, synthesis, induction and deduction were used. The novelty of the study lies in the substantiation of the concept of an adaptive system, the hardware of which, among other things, includes such a technical means as a three-antenna satellite compass. The study revealed that the current methodology for determining squat does not contain absolutely reliable and universal methods. At the same time, the system proposed at the conceptual level is also limited in its development due to the lack of a clear understanding of the further direction of the study and the associated set of problems to be solved. In order to eliminate this gap, a list of primary tasks for the evolution and development of an adaptive system for assessing the current and predicted values of the vessel's squat has been formulated, some of which involve conducting full-scale experiments.
Keywords:
economic security, ecological security, navigational safety, squat, UKC, computation, forecasting, system, neural network, architecture
Введение
Подавляющее большинство грузов в настоящее время перевозятся именно морем [1-5]. Недаром морские пути называются голубыми артериями мировой экономики. При этом грузы различаются тем же разнообразием, что и мировой валовый продукт, т.е. морские суда транспортируют практически все виды производимых в мире товаров. В таких обстоятельствах трудно переоценить значение судоходной отрасли.
Мировой океан является не только «дорогой» для судов, но местом обитания различных видов гидробионтов, большая часть которых относится к объектам промысла. Рыбопромысловые суда, добывающие за сутки тысячи тонн рыбы, вносят огромный вклад в обеспечение продовольственной безопасности (несмотря на то, что таковая отдельно не выделяется Стратегией национальной безопасности Российской Федерации). Рыбная продукция спасает от голода население развивающихся стран и входит немалой долей в рацион жителей стран развитых.
Таким образом, транспортные и рыбопромысловые морские суда по сути являются инструментом обеспечения экономической безопасности [6] — одного из стратегических национальных приоритетов, предусмотренных Стратегией национальной безопасности Российской Федерации [7, 8]. Очевидно, что надежность, целостность и безопасность этих инструментов определяет среди прочего экономическую безопасность. Иными словами, безопасность судоходства и, в частности, навигационная безопасность судов, является неотъемлемой частью экономической безопасности.
Акцент выше был сделан на навигационной безопасности в связи с тем, что именно навигационные аварии являются самой распространённой угрозой безопасности судоходства [9], а, значит, и угрозой экономической безопасности. Одним из видов навигационных аварий являются посадки судов на мель. При такой аварии на первый план может выйти уже не экономическая, а экологическая безопасность [10]. Мировая практика судоходства знает случаи, когда посадка на мель и последовавшая за ней утечка в морскую среду нефтепродуктов приводили к резкому изменению (ухудшению) жизненного уклада жителей прибрежных районов, огромному ущербу, длительному упадку и значительной переориентации экономики региона [11].
В свою очередь, одной из причин посадки судна на мель является игнорирование или некорректный учёт так называемого скоростного проседания судна — увеличения его осадки при движении на мелководье так же, как и уменьшения запаса воды под килем (UKC — Under Keel Clearance) [12]. Методология определения скоростного проседания предельно многообразна, однако признать тот или иной метод однозначно валидным и достоверным не представляется возможным. Здесь видится как минимум четыре доказательства этого тезиса. Первое — ни один из методов не является общим для судов нескольких типов. Второе — многие формулы предназначены для определения скоростного проседания либо только носа, либо только кормы. Третье — методическая погрешность всегда присутствует в любой из формул для определения скоростного проседания. И последнее, четвёртое доказательство — все методы основаны на многократных наблюдениях, т.е. носят строго эмпирический характер [13].
Вместе с тем, развитие таких математических инструментов, как нейронные сети [14], открывает новые пути развития методологии определения скоростного проседания судов. Так, в [13] предложена концепция адаптивной системы оценки текущего и прогностического значений скоростного проседания судна, основанной как раз на нейронных сетях. При этом, базовым техническим средством указанной системы является спутниковый компас, что определяет новизну исследования, т.к. ранее это устройство никогда не использовалось в целях определения скоростного проседания.
Однако, как и подразумевает этимология и содержание термина «концепция», указанная система представлена в [13] исключительно на уровне идеи, лишь с небольшой детализацией дальнейшего развития. Таким образом, следующей задачей по развитию системы оценки текущего и прогностического значений скоростного проседания судна является задача целеполагания, т.е. задача постановки целей и планирования действий для их достижения. Настоящая же работа посвящена формированию и структуризации перечня первичных задач, включая постановку и проведение эксперимента.
В итоге, объектом исследования является навигационная безопасность плавания судна, предметом исследования — скоростное проседание судна на мелководье, а цель исследования сформулирована следующим образом: формирование перечня задач, подлежащих решению для эффективно реализации концепции адаптивной системы оценки текущего и прогностического значений скоростного проседания судна, и краткое описание содержания этих задач.
Сущность скоростного проседания
в контексте влияния мелководья на движение судна
Скоростное проседание — явление, наблюдаемое при движении судна на мелководье. При таком движении у носовой части судна располагается область повышенного давления, в средней части давление падает и по направлению к корме вновь повышается, имея, однако, меньшее значение, чем в носовой части (рис. 1).
Рис. 1. Распределение давления вокруг корпуса судна
Сплошная линия на рис. 1 — давление при работающем винте, который подсасывает воду, увеличивая скорость её движения. Это приводит к понижению давления у кормовой части судна.
В соответствии с описанным распределением давления образуются волны: гребень у носовой части, подошва у миделя и второй гребень меньшей высоты у кормы. Вследствие образования носовой волны значительной высоты судно увеличивает дифферент на корму по сравнению с состоянием покоя. На эту систему основных волн накладываются расходящиеся волны, идущие как от форштевня, так и от ахтерштевня.
Сущность влияния мелководья на условия движения судна заключается в изменении системы волн, образующихся вокруг корпуса, что влечёт за собой рост сопротивления воды, проседание корпуса, увеличение дифферента на корму и ухудшение управляемости.
При числах Фруда меньше 0,3-0,4 волнообразование мало чем отличается от такового на глубокой воде. По мере уменьшения глубины при постоянной скорости судна, или, что тоже самое, с увеличением скорости судна при той же глубине число Фруда начинает увеличиваться. По мере его приближения к значению 0,7-0,8 угол раствора расходящихся волн увеличивается и происходит формирование поперечных волн у носовой и кормовой частей судна. Корпус судна, располагаясь между двумя этими волнами, проседает. Запас воды под килем уменьшается. Эти изменения сопровождаются увеличением волнового сопротивления и сопротивления трения (вследствие уменьшения расстояния между днищем судна и грунтом).
При дальнейшем увеличении числа Фруда и приближении его к единице начинается формирование мощной носовой волны, которую судно как бы толкает перед собой, располагаясь на заднем её склоне. Кормовая волна значительно меньшей высоты отодвигается за корму. Этому моменту соответствует наибольшее сопротивление воды движению судна и резкое увеличение дифферента на корму.
Таким образом, изменение волнообразования при движении судна на мелководье вызывает общее увеличение углубления судна, зависящее от скорости движения судна, т.е. скоростное проседание [15].
Концепция адаптивной системы оценки
текущего и прогностического значений скоростного проседания судна
Для создания системы определения скоростного проседания в первую очередь необходимо обосновать (выбрать) методику автоматического определения осадок судна на ходу судна. В представляемой концепции за таковую принята методика, основанная на использовании спутникового компаса, причём спутникового компаса трёхантенного [16-18]. Преимущество как самой методики, так и указанного курсоуказателя заключается в возможности определения не только высоты антенны над уровнем моря, но и дифферента, а, значит, и осадок судна носом и кормой так же, как и их изменения.
Система оценки текущего и прогностического значений скоростного проседания судна включает в себя (рис. 2):
- трёхантенный спутниковый компас;
- электронная картографическая навигационная информационная система (ЭКНИС);
- эхолот — устройство для измерения глубины под килем судна;
- основной блок — блок получения, хранения, обработки, интерпретации и предоставления информации, в обязательном порядке основной блок содержит информацию о координате z антенны спутникового компаса, а также о длине судна.
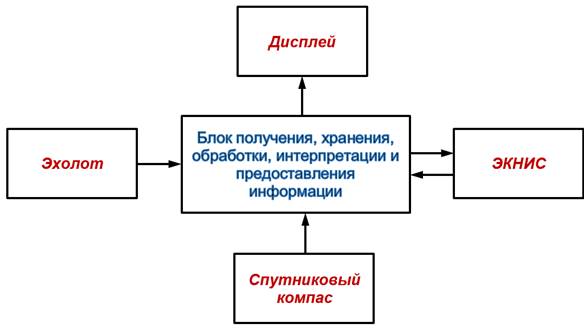
Рис. 2. Состав адаптивной системы оценки текущего и прогностического значений скоростного проседания судна и схема вычисления скоростного проседания
Система должна иметь следующий алгоритм работы:
1) спутниковый компас с заданной дискретностью измеряет высоту антенны и дифферент судна, дающий возможность получить осадки, а основной блок записывает измеренные значения в свою память;
2) в случае, когда два рядом стоящих по времени измерения с учётом сглаживания и допуска оказываются равными (скоростное проседание отсутствует), основной блок системы переходит в режим ожидания;
3) в случае, когда высота, дифферент или обе характеристики одновременно начинают меняться от измерения к измерению (осадки увеличиваются, а, значит, появляется скоростное проседание), основной блок после каждого измерения записывает в свою память слоты информации, при этом каждый слот включает в себя: скорость судна (спутниковый компас), глубину (эхолот), изменение осадок носом, кормой и по мидель-шпангоуту — непосредственно скоростное проседание, ширину узкости (ЭКНИС или радар);
4) каждый информационный слот попадает на вход обучаемой нейросети и инициирует очередной цикл обучения; выходом нейросети являются значения скоростного проседания по миделю, носу и корме при имеющейся скорости движения.
Представленная адаптивная система оценки текущего и прогностического значений скоростного проседания судна и схема вычисления скоростного проседания может функционировать как в режиме реального времени, так и в режиме предвычисления (прогнозирования). В случае первого режима средство отображения системы будет предоставлять пользователю величину скоростного проседания и/или UKC для нескольких (как правило, трёх — нос, корма, мидель) точек по длине судна и «глубину начала мелководья». Режим прогнозирования может быть реализован при помощи дополнительного информационного слоя электронной навигационной карты. Для получения необходимой прогнозной информации о скоростном проседании и/или запасе глубины под килем пользователю достаточно навести курсор на интересующую его точку акватории и установить скорость судна, с которой планируется движение. Следует заметить, что использование обучаемой нейросети как в общем, в самой системе, так и, в частности, в режиме прогнозирования даёт возможность предвычислить скоростное проседание так же, как и запас глубины под килем, для случая, когда оно ранее не осуществляло плавания в оцениваемом или сходных по характеристикам районах.
Перечень задач для развития адаптивной системы оценки
текущего и прогностического значений скоростного проседания судна
С целью поэтапной трансформации концепции системы в полноценный эффективный инструмент непрерывного автоматического определения скоростного проседания (запаса глубины под килем) предлагается следующий перечень задач.
Задача 1. Приведение высоты антенны спутникового компаса к нулю глубин.
Нуль глубин [19, 20] — условная поверхность, от которой измерены глубины, приведенные на морских навигационных картах. В Российской Федерации в морях без приливов за нуль глубин принимают средний уровень моря, а в приливных морях — низший уровень моря, обеспечивающий безопасность судовождения. На Атлантическом побережье США за нуль глубин принят средний уровень малых вод, на Тихоокеанском — средний уровень низких малых вод, а в большинстве стран Европы — средний уровень сизигийных малых вод. В некоторых портах, расположенных в мелководных районах и в устьях рек со значительными сгонно-нагонными колебаниями уровня, применяются условные нули глубин, о чем специально указывается в лоциях и на картах.
Для приведения антенны к нулю глубин необходимо в судовых условиях провести эксперимент, суть которого заключается в многократном измерении осадки по тому шпангоуту, в плоскости которого находится антенна с одновременным вычислением высоты прилива. На основе результатов каждой пары измерений и определяются значения поправки к нулю глубин, после обработки которых получается итоговое значение поправки.
В случае, если высота антенны неизвестна (нигде не указана), её можно определить, рассчитав вертикальное расстояние от антенны до точки (объекта) на судне с известной аппликатой.
Задача 2. Проведение экспериментов на судне по определению скоростного проседания (запаса глубины под килем) в различных условиях плавания при помощи технических средств, входящих в адаптивную систему оценки текущего и прогностического значений скоростного проседания судна.
Для проведения комплекса экспериментов необходимо иметь информацию о координатах (абсциссе, ординате и аппликате) в судовой системе координат антенны приёмника спутниковой навигации. В случае, если эти координаты нигде не зафиксированы документально, следует их измерить, используя опорные точки с уже известными координатами. Желательно выбрать такое количество опорных точек, чтобы в результате измерений получилась фигура погрешностей.
Суть первого эксперимента, проводимого в порту после предварительного определения осадок традиционным способом, заключается в одновременной фиксации координат, отображаемых приёмником спутниковой навигации, высоты антенны, глубины, измеряемой эхолотом, а также величины прилива. Оптимальная дискретность измерений составляет 1-2 часа при обязательном проведении измерений до и после погрузки-выгрузки.
Аналогичный эксперимент проводится и на переходе, с рекомендуемой частотой измерений один раз в час (3-4 раза за вахту).
В рамках третьей задачи необходимо:
1) связать средний уровень моря и нуль глубин (как правило, самая малая вода — это нуль глубин, а среднему уровню моря соответствует среднее значение прилива),
2) сопоставить средний уровень моря и уровенную поверхность (поверхность геоида),
3) обосновать методику определения вертикального расстояния между геоидом (среднем уровнем моря) и общеземным эллипсоидом (в частности, WGS 84) в конкретной точке (т.е. методику определения вертикальной погрешность общеземного эллипсоида).
Задача 4. Обобщить и проанализировать теорию и методологию определения UKC и скоростного проседания.
Задача 5. Обосновать требования к нейронной сети, её архитектуру и оценить возможность использования в целях настоящего исследования существующих и доступных нейросетей.
Общее описание нейросетей в контексте развития адаптивной системы
оценки текущего и прогностического значений скоростного проседания судна
В последние годы искусственные нейронные сети получили широкое распространение в различных областях, так как они способны обучаться на примерах и решать сложные задачи, подобные тем, что решает человек. Главное преимущество нейросетей — это способность к обучению и обобщению. Правильно обученная сеть выявляет скрытые зависимости между входными и выходными данными и способна выдавать верный результат даже на новых, ранее не встречавшихся или неполных данных [21]. Это делает нейросети перспективным инструментом для автоматизации и принятия решений в сложных ситуациях, требующих учета множества факторов, в том числе и в оценке скоростного проседания.
В настоящее время существует множество видов нейронных сетей, которые отличаются структурой соединений и областью применения. В число наиболее известных и распространённых видов нейросетей входят [21]:
- перцептрон — простейшая модель нейросети, состоящая из входов, одного нейрона (или небольшого числа нейронов) и выхода и способная решать базовые задачи распознавания образов, но для решения сложных задач его возможностей недостаточно;
- полносвязная сеть (многослойный перцептрон, MLP) — простая универсальная классическая сеть прямого распространения, используемая в задачах классификации и прогнозирования и состоящая из нескольких слоёв нейронов, при этом каждый из нейронов соединён со всеми нейронами следующего слоя, а информация проходит от входного слоя через скрытые слои к выходному;
- свёрточная нейронная сеть (CNN) — специализированная архитектура для обработки изображений и сигналов, используемая в задачах компьютерного зрения и содержащая сверточные слои, которые выделяют локальные признаки: небольшие фильтры (ядра) сканируют входное изображение и реагируют на примитивные элементы (контуры, текстуры и т.д.);
- рекуррентная нейронная сеть (RNN) — архитектура для последовательных данных (временных рядов, текстов, сигналов), которая используется в задачах, где важен порядок (машинный перевод, распознавание речи) и в которой нейроны имеют обратные связи, позволяющие сохранять внутреннее состояние и «память» о предыдущих входах (при обработке нового элемента последовательности сеть учитывает контекст предыдущих элементов);
- глубокие нейронные сети (DNN) — сети с большим (более 10) числом скрытых слоёв (десятки и более), которые могут изучать очень сложные и абстрактные паттерны за счёт иерархической многоуровневой обработки информации, требуют для своего обучения огромных объёмов данных и вычислительных ресурсов и являются основой большинства достижений человечества в области машинного обучения (системы распознавания речи, самоуправляемые автомобили).
Практическое применение нейронных сетей при решении конкретных задач (в том числе и задачи определения скоростного проседания) возможной только при соблюдении следующих условий:
- надёжные данные и качество выборки — нейросеть необходимо обучить на репрезентативном наборе данных, содержащем все типичные ситуации, с которыми она столкнётся. достаточная вычислительная мощность;
- корректная архитектура и настройка — структура сети (число слоёв, нейронов, типы связей) должна соответствовать характеру задачи, а параметры обучения должны быть настроены таким образом, чтобы добиться сходимости;
- тестирование и валидация — после обучения нейросеть должна пройти тщательную проверку в различных сценариях, необходимо валидировать работу сети на независимых данных, имитирующих реальные условия эксплуатации (различные типы судов, погодные условия, волны и пр.);
- учет физических факторов и ограничений в том числе и через использование в входных параметрах сети классических формул и (или) гибридных нейро-нечётких систем, учитывающих априорные экспертные правила;
- безопасность и отказоустойчивость, обеспечиваемые через интеграцию в нейросети механизмов контроля решений, принимаемых нейросетью, алгоритма объяснения выходных данных (решений) и возможность аварийного перехода к ручному управлению или резервной модели.
Таким образом, нейронная сеть, предназначенная для решения задачи обеспечения навигационной безопасности плавания судна (в частности, определения скоростного проседания) должна быть хорошо обучена на достаточных данных, правильно настроена, протестирована во всевозможных условиях и учитывать специфические факторы морской практики.
Величина скоростного проседания судна зависит от множества факторов: скорости, формы корпуса (коэффициента полноты), отношения глубины к осадке, сопротивления воды и т.д. В целях оценки скоростного проседания и запаса глубины под килем нейросеть способна обучаться на накопленных результатах измерений осадки судна и выявлять нелинейные зависимости между параметрами судна, его движения и величиной скоростного проседания, и, как следствие, с высокой точностью предсказывать последнее. Фактически, нейросеть является электронным консультантом: она непрерывно вычисляет текущую и прогнозную величину скоростного проседания и UKC (с учётом скорости и условий) и предупреждает, если запас под килем сокращается до опасного предела.
Архитектура нейросети, подлежащей использованию в адаптивной системе оценки текущего и прогностического значений скоростного проседания судна может состоять из следующих компонентов:
- входной блок (датчики и данные), через который система получает данные с навигационных приборов судна и внешних источников, включая: текущую глубину под килем (эхолот), а также прогноз глубин впереди по курсу (данные электронной карты), скорость судна и режим движения, статическую осадку судна, параметры загрузки, крен, дифферент, гидрологические данные, параметры волнения, размеры и форму судна;
- нейронная сеть прогноза просадки — многослойная нейронная сеть (например, полносвязная нейросеть, либо нейросеть со специализацией — комбинация свёрточных слоёв для пространственных данных и рекуррентных для временной динамики), принимает на вход параметры из входного блока (набор числовых признаков) и оценивает текущее и прогностические значения скоростного проседания;
- модуль расчёта UKC и рекомендаций, который в дополнение выполняет и функции сигнализации — когда запас глубины под килем становится меньше требуемого, он генерирует предупреждение;
- интерфейс оператора.
Нейросеть может быть обучена на выборке, содержащей как результаты модельных испытаний, так и реальные результаты определения скоростного проседания для разных судов и условий. В процессе обучения сеть научится соответствию между входными факторами (скорость, глубина и пр.) и выходной величиной просадки. Чтобы улучшить обобщающие способности, как это было уже замечено ранее, в обучающую выборку полезно включить результаты вычислений по известным формулам. Таким образом, нейросеть будет принимать во внимание и эмпирические данные, и классические зависимости.
Представленная гипотетическая архитектура сочетает в себе модель данных (нейросеть) и модель знаний (встроенные расчёты UKC и порогов, основанные на правилах). Нейросеть выполняет наиболее сложную часть — оценку нелинейной просадки. В итоге система способна в режиме реального времени помогать судоводителю выбирать безопасную скорость на мелководье.
Необходимо отметить, что для повышения надёжности можно использовать комбинацию нескольких сетей, либо объединить нейросеть с фильтром Калмана, отсеивающим шумы датчиков. В представленной упрощённой архитектуре эти детали опущены, однако в реальном проекте они могут быть успешно использованы.
Заключение.
В условиях современного судоходства вопрос безопасности движения на акваториях с ограниченными глубинами приобретает особое значение. Значительная доля морских аварий и инцидентов связана с неправильной оценкой скоростного проседания и недостаточным запасом глубины под килем. Даже кратковременное уменьшение UKC ниже критических значений может привести к повреждению корпуса, потере управляемости, посадке на грунт, аварийным разливам нефтепродуктов и, как следствие, к появлению угроз как экономической, так и экологической безопасности. В этой связи создание систем, способных в реальном времени предсказывать динамику осадки судна, становится не просто задачей профессионального комфорта, а необходимым условием безопасной эксплуатации флота [22].
В настоящей работе представлена концепция адаптивной системы оценки текущего и прогностического значений скоростного проседания судна и схема вычисления скоростного проседания, а также сформирован перечень задач (в большинстве своём связанных с проведением экспериментов), подлежащих решению для эффективной реализации концепции.
В качестве математического и одновременного программного инструмента системы предлагается использовать нейронную сеть, т.к. именно иискусственные нейронные сети открывают новые возможности для решения задач обеспечения навигационной безопасности плавания судна (в частности, задач предвычисления скоростного проседания и запаса глубины под килем). Нейросети способны на основе больших массивов накопленных данных предсказывать поведение судна в сложных условиях, в том числе осуществлять текущую и заблаговременную оценку скоростного проседания и UKC. Главное достоинство нейросетей в навигации — сохранять работоспособность в ситуациях, когда классические теоретические модели не могут дать результат или достоверность результата оказывается сомнительной. В случае мелководья нейросеть может служить дополнительным электронным помощником, постоянно анализирующим обстановку под килем и предупреждающим об опасном сближении с грунтом.
Однако обоснование, внедрение и использование нейросетей для определения скоростного проседания и запаса глубины под килем категорично требуют крайне продуманного подхода. Здесь необходимо гарантировать высокое качество обучающих данных, обеспечить учёт физических ограничений и тщательно протестировать систему перед эксплуатацией. Нейросеть должна дополнять, а не заменять человека: окончательные решения остаются за судоводителем, особенно в нестандартных ситуациях.
Таким образом, реализация предложенной концепции через решение обозначенных в работе задач и использование нейросетей позволит несколько нивелировать угрозы экономической и экологической безопасности.
Библиография
1. Селезнев П.С., Кореньков И.О. Значение международных морских транспортных путей для развития экономики и укрепления национальной безопасности России // ЭТАП: экономическая теория, анализ, практика. 2025. № 1. С. 78-109. DOI: 10.24412/2071–6435-2025-1-78-109 EDN: TOXTIW.
2. Ахрамеева А.В. Ретроспективный анализ эволюции портовых функций и логистических путей доставки грузов в урбанистических условиях // Системный анализ и логистика. 2025. № 2(45). С. 68-79. DOI: 10.31799/2077–5687-2025-2-68-79 EDN: FZSHJM.
3. Коваль В.Н. Особенности применения норм международного частного права в морских перевозках // Московский журнал международного права. 2024. № 2. С. 33-45. DOI: 10.24833/0869–0049-2024-2-33-45 EDN: SFILDR.
4. Ларионова А.Р., Свиридонова А.А. Морские перевозки в мировой торговле: особенности организации // Логистика-евразийский мост: Материалы XVIII Международной научно-практической конференции, Красноярск, 27-30 апреля 2023 года. Красноярск: Красноярский государственный аграрный университет, 2023. С. 134-139. EDN: AWEYGU.
5. Тимченко Т.Н., Асланов Г.Г. Концептуальный подход к организации морских перевозок в порты с ограниченными глубинами // Эксплуатация морского транспорта. 2023. № 3(108). С. 49-57. DOI: 10.34046/aumsuomt108/8 EDN: LTVLOQ.
6. Абдурашидова Х.Б. Обеспечение экономической безопасности стран в условиях глобальных рисков // Моя профессиональная карьера. 2025. Т. 2, № 68. С. 303-311. EDN: WLGLTG.
7. Лобанов В.В. Современный взгляд на формирование национальной безопасности России // Финансовые рынки и банки. 2025. № 2. С. 125-131. EDN: FVADHP.
8. Сагирян И.Г., Петренко А.С. Эволюция концепта "национальная безопасность" в трех редакциях стратегии национальной безопасности Российской Федерации // Правовой порядок и правовые ценности. 2025. Т. 3, № 1. С. 34-45. DOI: 10.23947/2949-1843-2025-3-1-34-45 EDN: LGMKFV.
9. Абанин С.С. Влияние использования навигационных технологий отечественного судостроения на безопасность // Транспортное дело России. 2024. № 6. С. 94-97. EDN: AQFNHD.
10. Лукьянов Г.Е., Максимов А.А. Аварийные ситуации на море: причины, предотвращение и реагирование // Журнал технических исследований. 2025. Т. 11, № 1. С. 84-88. EDN: AJKBZG.
11. Бондарев В.А., Ермаков С.В. Навигационная авария в контексте управления риском чрезвычайных ситуаций // Проблемы анализа риска. 2017. Т. 14, № 4. С. 58-66. EDN: ZGSSKH.
12. Ермаков С.В. Исследование скоростного режима судов на открытом прямолинейном участке Калининградского морского канала // Вестник государственного университета морского и речного флота им. адмирала С.О. Макарова. 2017. Т. 9, № 2. С. 252-259. DOI: 10.21821/2309-5180-2017-9-2-252-259 EDN: YLFWIJ.
13. Ермаков С.В., Шевчук Д.В. Концепция адаптивной системы оценки текущего и прогностических значений скоростного проседания судна // Балтийский морской форум: Материалы XI Международного Балтийского морского форума. В 8-ми томах, Калининград, 25-30 сентября 2023 года. Калининград: Калининградский государственный технический университет, 2023. С. 25-28. EDN: DQCFJC.
14. Заирова Д.Х. Алгоритмы нейронных сетей: теоретические основы и механизмы работы // Научный Лидер. 2025. № 3(204). С. 39-47. EDN: BKZVOW.
15. Управление судном и его техническая эксплуатация / Е.И. Жуков, М.Н. Либензон, М.Н. Письменный [и др.]; ред. А.И. Щетинина. М.: Транспорт, 1983. 657 с.
16. Саранча А.М. Выносные радионавигационные приборы // Modern Science. 2019. № 12-1. С. 609-613.
17. Саранча А.М. Спутниковый компас "Фарватер"-альтернатива гиро-и магнитных компасов // Аспирант. 2017. № 9(35). С. 18-21. EDN: YQVEUR.
18. Комаровский Ю.А. Чувствительность спутникового компаса JLR-20 // Проблемы транспорта Дальнего Востока. Доклады научно-практической конференции. 2017. Т. 1. С. 203-221. EDN: LBUZVB.
19. Решетняк С.В., Шальнов Л.Г. Практическая реализация согласованного "Нуля глубин Балтийского моря BSCD2000" в странах Балтийского региона // Навигация и гидрография. 2020. № 59. С. 37-51. EDN: ERPBHG.
20. Елагин А.А., Демидов А.Л. Анализ методов определения колебаний уровня моря при гидрографических работах // Вестник государственного университета морского и речного флота им. адмирала С.О. Макарова. 2016. № 2(36). С. 78-89. DOI: 10.21821/2309-5180-2016-8-2-78-89 EDN: VTNQAZ.
21. Сергеев А.П., Тарасов Д.А. Введение в нейросетевое моделирование / под общ. ред. А.П. Сергеева. Екатеринбург: Изд-во Урал. ун-та, 2017. 128 с. EDN: XEBEYM.
22. Maljković M., Pavić I., Meštrović T., Perkovič M. Ship Maneuvering in Shallow and Narrow Waters: Predictive Methods and Model Development Review // Journal of Marine Science and Engineering. 2024. Vol. 12, No. 8. Art. 1450 (21 p.).
References
1
. Seleznev, P. S., & Korenkov, I. O. (2025). The significance of international maritime transport routes for the development of the economy and strengthening national security of Russia. ETAP: Economic Theory, Analysis, Practice, (1), 78-109. https://doi.org/10.24412/2071–6435-2025-1-78-109
2
. Akhramieva, A. V. (2025). Retrospective analysis of the evolution of port functions and logistics delivery routes in urban conditions. System Analysis and Logistics, (2), 68-79. https://doi.org/10.31799/2077–5687-2025-2-68-79
3
. Koval, V. N. (2024). Features of the application of international private law norms in maritime transport. Moscow Journal of International Law, (2), 33-45. https://doi.org/10.24833/0869–0049-2024-2-33-45
4
. Larionova, A. R., & Sviridonova, A. A. (2023). Maritime transport in world trade: Features of organization. In Logistics-Eurasian Bridge: Proceedings of the XVIII International Scientific and Practical Conference (pp. 134-139).
5
. Timchenko, T. N., & Aslanov, G. G. (2023). Conceptual approach to organizing maritime transport in ports with limited depths. Exploitation of Maritime Transport, (3), 49-57. https://doi.org/10.34046/aumsuomt108/8
6
. Abdurashidova, Kh. B. (2025). Ensuring economic security of countries in the context of global risks. My Professional Career, 2(68), 303-311.
7
. Lobanov, V. V. (2025). A modern view on the formation of national security in Russia. Financial Markets and Banks, (2), 125-131.
8
. Sagiryan, I. G., & Petrenko, A. S. (2025). The evolution of the concept of "national security" in three editions of the national security strategy of the Russian Federation. Legal Order and Legal Values, 3(1), 34-45. https://doi.org/10.23947/2949-1843-2025-3-1-34-45
9
. Abanin, S. S. (2024). The impact of the use of navigation technologies of domestic shipbuilding on safety. Transport Affairs of Russia, (6), 94-97.
10
. Lukyanov, G. E., & Maximov, A. A. (2025). Emergency situations at sea: Causes, prevention, and response. Journal of Technical Research, 11(1), 84-88.
11
. Bondarev, V. A., & Ermakov, S. V. (2017). Navigation accident in the context of emergency risk management. Problems of Risk Analysis, 14(4), 58-66.
12
. Ermakov, S. V. (2017). Study of vessel speed mode on an open straight section of the Kaliningrad Sea Canal. Bulletin of Admiral S. O. Makarov State University of Maritime and Inland Shipping, 9(2), 252-259. https://doi.org/10.21821/2309-5180-2017-9-2-252-259
13
. Ermakov, S. V., & Shevchuk, D. V. (2023). Concept of adaptive assessment system for current and predictive values of vessel speed sinking. In Baltic Marine Forum: Proceedings of the XI International Baltic Marine Forum (Vol. 8, pp. 25-28).
14
. Zairova, D. K. (2025). Neural network algorithms: Theoretical foundations and mechanisms of operation. Scientific Leader, (3), 39-47.
15
. Management of the Ship and Its Technical Operation / E. I. Zhukov, M. N. Libenzon, M. N. Pis'mennyi [et al.]; edited by A. I. Shchetinin. (1983). Transport.
16
. Saranchа, A. M. (2019). External radio navigation devices. Modern Science, (12-1), 609-613.
17
. Saranchа, A. M. (2017). The satellite compass "Farvater"-an alternative to gyro and magnetic compasses. Aspiring Scientist, (9), 18-21.
18
. Komarovsky, Y. A. (2017). Sensitivity of the satellite compass JLR-20. In Problems of Transport in the Far East: Reports of the Scientific and Practical Conference (Vol. 1, pp. 203-221).
19
. Reshetnyak, S. V., & Shalnov, L. G. (2020). Practical implementation of the agreed "Zero depth of the Baltic Sea BSCD2000" in the Baltic region countries. Navigation and Hydrography, (59), 37-51.
20
. Yelagin, A. A., & Demidov, A. L. (2016). Analysis of methods for determining sea level fluctuations during hydrographic works. Bulletin of Admiral S. O. Makarov State University of Maritime and Inland Shipping, (2), 78-89. https://doi.org/10.21821/2309-5180-2016-8-2-78-89
21
. Sergeev, A. P., & Tarasov, D. A. (2017). Introduction to neural network modeling / edited by A. P. Sergeev. Ural University Press.
22
. Maljković, M., Pavić, I., Meštrović, T., & Perković, M. (2024). Ship maneuvering in shallow and narrow waters: Predictive methods and model development review. Journal of Marine Science and Engineering, 12(8), Article 1450.
Результаты процедуры рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Представленная статья на тему «Целеполагание для развития адаптивной системы оценки текущего и прогностического значений скоростного проседания судна» соответствует тематике журнала «Вопросы безопасности» и посвящена вопросу адаптивной системы оценки текущего и прогностического значений скоростного проседания судна, основанной на нейронных сетях. В качестве задачи по развитию системы оценки текущего и прогностического значений скоростного проседания судна авторы указывают задачу целеполагания, т.е. задача постановки целей и планирования действий для их достижения. Суть работы, как указывают авторы, заключается в формировании и структуризации перечня первичных задач, включая постановку и проведение эксперимента.
Авторы в статье ссылаются на работы отечественных и зарубежных авторов. Список литературы содержит двадцать два источника. На каждый источник из списка литературы имеются ссылки в тексте.
В представленной работе изложена концепция адаптивной системы оценки текущего и прогностического значений скоростного проседания судна и схема вычисления скоростного проседания, а также сформирован перечень задач, подлежащих решению для эффективной реализации концепции.
В качестве математического и одновременного программного инструмента системы авторы предлагают использовать нейронную сеть.
Авторы рассматривают архитектуру нейросети, подлежащей использованию в адаптивной системе оценки текущего и прогностического значений скоростного проседания судна, состоящую из следующих компонентов:
- входной блок (датчики и данные);
- нейронная сеть прогноза просадки;
- модуль расчёта UKC и рекомендаций;
- интерфейс оператора.
В заключительной части авторы указывают, что реализация предложенной концепции через решение обозначенных в работе задач и использование нейросетей позволит несколько нивелировать угрозы экономической и экологической безопасности.
Статья структурирована – выделены введение, заключение, имеется внутреннее членение основной части (имеются разделы - сущность скоростного проседания в контексте влияния мелководья на движение судна, концепция адаптивной системы оценки текущего и прогностического значений скоростного проседания судна, перечень задач для развития адаптивной системы оценки текущего и прогностического значений скоростного проседания судна, общее описание нейросетей в контексте развития адаптивной системы оценки текущего и прогностического значений скоростного проседания судна).
Стиль и язык изложения материала является достаточно доступным для широкого круга читателей. Практическая значимость статьи четко обоснована. Статья по объему соответствует рекомендуемому объему от 12 000 знаков.
К недостаткам можно отнести следующие моменты: из содержания статьи не прослеживается научная новизна, не сформулирован предмет исследования.
Рекомендуется четко обозначить научную новизну исследования, сформулировать предмет исследования.
Статья «Целеполагание для развития адаптивной системы оценки текущего и прогностического значений скоростного проседания судна» требует доработки по указанным выше замечаниям. После внесения поправок рекомендуется к повторному рассмотрению редакцией рецензируемого научного журнала «Вопросы безопасности».
Результаты процедуры повторного рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Рецензируемая статья посвящена целеполаганию в рамках развития адаптивной системы оценки текущего и прогностического значения скоростного проседания судна. Предмет исследования чётко определён: это навигационная безопасность плавания судна в условиях мелководья, а именно – феномен скоростного проседания, существенно влияющий на запас глубины под килем и, как следствие, на безопасность судоходства. Авторы рассматривают данный феномен в контексте экономической и экологической безопасности, что придаёт исследованию междисциплинарный характер и усиливает его значимость.
Методология исследования базируется на применении современных технических средств, включая трёхантенный спутниковый компас, эхолот, электронные картографические системы, а также использование нейронных сетей для анализа и прогнозирования. Такой подход сочетает в себе как классические методы эмпирического наблюдения, так и новейшие алгоритмы интеллектуальной обработки данных. В работе прослеживается чёткая логика: от анализа существующих методов определения скоростного проседания к обоснованию необходимости их модернизации и применению адаптивной системы, способной работать в реальном времени и в режиме прогнозирования.
Актуальность исследования не вызывает сомнений. В современных условиях глобализации морских перевозок вопросы безопасности судоходства приобретают ключевое значение, а аварии, связанные с посадкой судов на мель, имеют не только экономические, но и экологические последствия. Авторский акцент на предотвращении таких рисков с помощью интеллектуальных систем делает исследование особенно своевременным.
Научная новизна статьи выражена в предложении концепции адаптивной системы, где впервые в качестве базового средства используется спутниковый компас для определения осадок, а также в применении нейронных сетей для оценки и прогнозирования скоростного проседания. В работе представлен перечень задач, решение которых необходимо для реализации предложенной концепции, что фактически задаёт программу дальнейших исследований.
Стиль и структура статьи выдержаны на высоком научном уровне. Текст последовательно выстроен: от постановки проблемы и теоретических основ — к описанию системы, перечню задач и заключительным выводам. Содержание иллюстрировано схемами и рисунками, что облегчает восприятие материала. Изложение ясное, без излишней терминологической перегруженности, но в то же время строгое и научное.
Библиография статьи обширна и включает как современные исследования российских и зарубежных авторов, так и классические труды, что демонстрирует глубокую проработку материала и опору на авторитетные источники. Ссылки приведены корректно, что повышает достоверность изложения.
Авторы учитывают и критику существующих методов, отмечая их эмпирический характер, что делает обращение к нейросетевым технологиям обоснованным и перспективным. Тем самым статья не только констатирует существующую проблему, но и предлагает конкретное направление её решения.
В выводах подчёркивается необходимость внедрения адаптивной системы оценки скоростного проседания как условия обеспечения безопасной эксплуатации флота. Эта часть работы убедительна и логически завершает исследование. Для читательской аудитории статья представляет значительный интерес: она адресована как специалистам в области мореплавания и судостроения, так и исследователям в сфере интеллектуальных систем и информационной безопасности.
В целом статья отличается высоким уровнем проработки, содержит актуальные результаты и может быть рекомендована к публикации без существенных доработок.
|
 Рус
Рус









