|
Программные системы и вычислительные методы
Оформленная ссылка на статью:
Сергеев Д.А., Родионов Д.Г., Поляков П.А., Конников Е.А. Сенсорно-информированная риск-ориентированная робастная идентификация составных адаптивных динамических моделей (АДМ) цифрового двойника производственного актива // Программные системы и вычислительные методы. 2026. № 2. С. 1-22. DOI: 10.7256/2454-0714.2026.2.78321 EDN: QTPHSP URL: https://nbpublish.com/library_read_article.php?id=78321
Сенсорно-информированная риск-ориентированная робастная идентификация составных адаптивных динамических моделей (АДМ) цифрового двойника производственного актива
Сергеев Дмитрий Анатольевич
кандидат экономических наук
доцент; институт промышленного менеджмента, экономики и торговли; Санкт-Петербургский политехнический университет Петра Великого
194021, Россия, г. Санкт-Петербург, Выборгский р-н, ул. Новороссийская, д. 50
Sergeev Dmitrii Anatol'evich
PhD in Economics
Associate Professor; Institute of Industrial Management, Economics and Trade; Peter the Great St. Petersburg Polytechnic University
194021, Russia, St. Petersburg, Vyborg district, Novorossiysk St., 50

|
sergeev_da@spbstu.ru
|
|
 |
Другие публикации этого автора
|
|
Родионов Дмитрий Григорьевич
ORCID: 0000-0002-1254-0464
доктор экономических наук
профессор; институт промышленного менеджмента, экономики и торговли; Санкт-Петербургский политехнический университет Петра Великого
Директор Высшей инженерно-экономической школы; Санкт-Петербургский политехнический университет Петра Великого
194021, Россия, г. Санкт-Петербург, Выборгский р-н, ул. Новороссийская, д. 50
Rodionov Dmitrii Grigor'evich
Doctor of Economics
Professor; Institute of Industrial Management, Economics and Trade; Peter the Great St. Petersburg Polytechnic University
Director of the Higher School of Engineering and Economics; Peter the Great St. Petersburg Polytechnic University
194021, Russia, St. Petersburg, Vyborg district, Novorossiysk St., 50
|
|
drodionov@spbstu.ru
|
|
 |
Другие публикации этого автора
|
|
Поляков Прохор Александрович
ORCID: 0000-0003-1362-6283
Исследователь лаборатории "Политех-Инвест"; Санкт-Петербургский политехнический университет Петра Великого
194021, г. Санкт-Петербург, ул. Новороссийская, д. 50, лит. А
Polyakov Prohor Aleksandrovich
Researcher at the Polytech-Invest Laboratory; Peter the Great St. Petersburg Polytechnic University
194021, St. Petersburg, Novorossiysk str., 50, lit. A
|
|
prohor@polyakov-box.ru
|
|
 |
Другие публикации этого автора
|
|
|
Конников Евгений Александрович
ORCID: 0000-0002-4685-8569
кандидат экономических наук
доцент; Высшая инженерно-экономическая школа; Санкт-Петербургский политехнический университет Петра Великого
195251, Россия, г. Санкт-Петербург, Калининский р-н, ул. Политехническая, д. 29
Konnikov Evgenii Aleksandrovich
PhD in Economics
Associate Professor; Higher School of Engineering and Economics; Peter the Great St. Petersburg Polytechnic University
195251, Russia, St. Petersburg, Kalininsky district, Politechnicheskaya str., 29
|
|
konnikov_ea@spbstu.ru
|
|
 |
Другие публикации этого автора
|
|
|
DOI: 10.7256/2454-0714.2026.2.78321
EDN:
QTPHSP
Дата направления статьи в редакцию:
20-02-2026
Дата получения первой рецензии с формулировкой «Статья не может быть опубликована в предложенном варианте. Отправлена на доработку с рекомендациями рецензента»: 23-02-2026 08:03
Дата
доработки рукописи автором после первой рецензии:
20-02-2026 14:24
Дата получения последней положительной рецензии с рекомендацией «опубликовать»: 24-02-2026 11:53
Статья публикуется в одобренном рецензентами варианте (после получения последней положительной рецензии, рекомендующей рукопись к публикации) с исправлениями автора (внесенными им после получения предварительных рецензий, не рекомендующих рукопись к публикации).
Все рецензии (включая предварительные рецензии) опубликованы в открытом доступе непосредственно за текстом самой статьи. Все варианты авторских исправлений хранятся в депозитарии издательства и могут быть доступны по требованию уполномоченных организаций.
Прочитать все рецензии на эту статью
Дата публикации:
27-02-2026
Аннотация:
Предметом исследования является сенсорно-информированный риск-ориентированный подход к робастной онлайн-идентификации составных адаптивных динамических моделей, применяемых как вычислительное ядро цифрового двойника производственного актива. Объектом исследования является производственный актив, наблюдаемый через поток многомерных сенсорных измерений в условиях смены режимов работы, нестационарности, шума и выбросов. Автор подробно рассматривает задачу преобразования разнородных сигналов в устойчивую к деградационным искажениям модель состояния, которая поддерживает воспроизводимое управленческое решение о целесообразности вмешательства. Особое внимание уделяется согласованию процедур идентификации с рисковыми критериями эксплуатации, чтобы диагностическая неопределенность переводилась в количественную оценку предкритического состояния и далее в экономически обоснованное бинарное правило управления. Рассматривается также композиционная структура модели, в которой локальные подсистемы формируются из групп датчиков и объединяются в интегральный риск с учетом критичности элементов. Методология основана на стандартизации сигналов, группировании датчиков по статистическим связям, построении индекса здоровья методом главных компонент и робастной рекурсивной идентификации его локальной динамики в виде AR(1) с адаптивным забыванием и ограничением влияния аномалий, затем риск оценивается через прогноз и логистическое преобразование. Основными выводами проведенного исследования являются подтверждение работоспособности предложенной схемы робастной идентификации и демонстрация того, что риск-ориентированная интерпретация прогноза деградации позволяет получать устойчивое правило вмешательства при деградации качества данных. Существенным вкладом автора в исследование темы является объединение нескольких уровней робастности, где устойчивость достигается одновременно за счет адаптивного коэффициента забывания, ограничивающего влияние нестационарности, и за счет функции влияния Хьюбера, подавляющей выбросы. Новизна исследования заключается в композиционном построении цифрового двойника, когда локальные вероятности предкритического состояния подсистем агрегируются в интегральный риск с весами критичности и далее переводятся в бинарное решение через асимметричную модель затрат, учитывающую различие стоимости вмешательства и стоимости пропуска опасного состояния. Практическая значимость подтверждена апробацией на раздельных обучающей и тестовой выборках открытого набора NASA C-MAPSS, где предкритическое состояние задается через остаточный ресурс и порог близости к отказу, а качество оценивается метриками вероятностного ранжирования, бинарной классификации и средними затратами по функции потерь.
Ключевые слова:
цифровой двойник, производственный актив, адаптивные модели, композитная модель, сенсорная идентификация, робастная идентификация, рекурсивный МНК, коэффициент забывания, функция Хьюбера, прогноз деградации
Abstract: The subject of the research is a sensor-informed risk-oriented approach to robust online identification of composite adaptive dynamic models used as the computational core of a digital twin of a production asset. The object of the research is a production asset observed through a stream of multidimensional sensor measurements under conditions of changing operating modes, non-stationarity, noise, and outliers. The author thoroughly examines the task of transforming heterogeneous signals into a degradation-resistant state model that supports reproducible management decisions on the advisability of intervention. Special attention is given to aligning identification procedures with risk criteria for operation so that diagnostic uncertainty translates into a quantitative assessment of the pre-critical state and further into an economically justified binary control rule. The compositional structure of the model is also considered, where local subsystems are formed from groups of sensors and combined into an integral risk taking into account the criticality of the elements. The methodology is based on signal standardization, grouping sensors by statistical relationships, constructing a health index using principal component analysis, and robust recursive identification of its local dynamics in the form of AR(1) with adaptive forgetting and a limitation of the influence of anomalies; then, risk is assessed through forecasting and logistic transformation. The main conclusions of the conducted research are the confirmation of the effectiveness of the proposed scheme for robust identification and the demonstration that a risk-oriented interpretation of the degradation forecast allows for a stable intervention rule to be obtained in cases of data quality degradation. A significant contribution of the author to the research topic is the integration of several levels of robustness, where stability is achieved simultaneously through the adaptive forgetting factor, which limits the influence of non-stationarity, and through the influence function of Huber, which suppresses outliers. The novelty of the research lies in the compositional construction of the digital twin, where local probabilities of the pre-critical state of subsystems are aggregated into integral risk with criticality weights and then translated into a binary decision through an asymmetric cost model that accounts for the difference in the cost of intervention and the cost of missing a hazardous state. The practical significance is confirmed by testing on separate training and testing datasets from the open NASA C-MAPSS set, where the pre-critical state is defined through residual resource and the threshold proximity to failure, and quality is evaluated using metrics of probabilistic ranking, binary classification, and average costs based on the loss function.
Keywords:
digital twin, production asset, adaptive models, composite model, biometric identification, robust identification, recursive MNC, forgetting coefficient, Hubert function, degradation forecast
Введение
Цифровая трансформация производственных компаний и групп компаний всё чаще сталкивается с тем, что разные подразделения по-разному видят целевую модель производственной и бизнес-структуры и по-разному понимают конечный результат изменений, что в свою очередь порождает несогласованные метрики, неодинаковые правила интерпретации данных и, как следствие, ошибки управленческих решений на всех уровнях — от эксплуатации оборудования до планирования ремонтов и инвестиций. В контексте цифровой информационной среды данная проблема проявляется особенно остро. Влияние информационной среды на конкурентоспособность и управляемость цифрового предприятия раскрывается в работе [1], неопределённость и многосценарность состояний сложных систем и рынков — в исследовании [2], а роль согласованности коллективов и процедур принятия решений — в работе [3]. При этом факторы устойчивости и воспроизводимости решений в цифровой среде дополняются поведенческими и организационными аспектами (устойчивое потребление, влияние информационной среды на субъектов МСП и др.), рассмотренными в исследованиях [4–6]. Для промышленности это означает, что ошибки цифровой трансформации быстро превращаются в ошибки управления активом – либо пропуск критического состояния (дорогие остановы и аварии), либо чрезмерные ложные срабатывания (перерасход на обслуживание и снижение доступности).
В производственных системах указанная проблема напрямую связана с задачами надежности, диагностики и прогностики. Математические основы теории надежности и вероятностные модели отказов изложены в классических работах Гнеденко, Беляева и Соловьёва [7], а также Барлоу и Прошана [8], а нормативная рамка и терминология надежности закреплены в ГОСТ [21]. Диагностический контур и понятийный аппарат технической диагностики представлены у Биргера [9], в справочнике под редакцией Клюева [10] и соответствующем ГОСТ [22]. Вектор развития практики обслуживания смещается к прогнозированию остаточного ресурса. Обзор Jardine, Lin и Banjevic [11] систематизирует подходы диагностики в обслуживании по состоянию, а систематический обзор Lei и соавторов [12] описывает цепочку «сбор данных → признаки → прогноз RUL». Однако даже при наличии эффективных методов прогнозирования ключевой разрыв остаётся организационно-методическим – предприятию нужен единый формализованный механизм, связывающий модели, данные и правило решения так, чтобы разные подразделения могли одинаково интерпретировать состояние актива и одинаково оценивать компромисс потерь.
Данный разрыв естественно рассматривается в логике системного анализа и управления сложными системами. Принципы системного подхода и декомпозиции представлены у Волковой и Денисова [15], методология системного анализа — у Перегудова и Тарасенко [16], а математическая теория систем и роль оценивания состояния в динамике — у Калмана, Фалба и Арбиба [17]. Информационные основы управления, критичные для репозиторного хранения моделей и данных, раскрыты у Денисова [18], прикладные аспекты системного анализа в управлении предприятием — у Губенко, Ксенофонтовой и Мерзликиной [19], а задачи хранения и обработки слабоструктурированных документов в информационно-управляющих системах — у Бутаковой, Климанской и Янц [20]. Для динамических моделей важны корректность и устойчивость вычислительных процедур. В контексте стохастических динамических моделей это отражено у Солдатовой [13], в задачах надежности структурно-сложных систем — у Нозика [14], а свойства численных методов решения ОДУ, влияющие на корректность динамического моделирования и прогнозов, обсуждаются у Ракитского [23]. В совокупности указанные источники подводят к выводу, согласно которому для снижения ошибок цифровой трансформации необходима такая модельная основа, которая масштабируется от компонента к предприятию, адаптируется к изменениям и неопределённости, учитывает качество данных и порождает воспроизводимое риск-ориентированное правило управленческого решения.
В настоящей работе в качестве такой основы используется аппарат адаптивных динамических моделей, развертываемых как цифровой двойник и масштабируемых до составных (интегральных) представлений. Чтобы последовательно зафиксировать единый понятийный каркас (и тем самым устранить неоднозначности интерпретации между участниками), далее используются следующие определения:
1. АДМ (адаптивные динамические модели) — математические модели сложных многофакторных систем со структурой и параметрами, которые могут изменяться так, чтобы ошибка между выходами модели и реальным объектом была минимальной; при этом выявляются причинно-следственные связи, описывающие переход системы между состояниями [24].
Логическим продолжением этого определения является требование адаптации в условиях изменчивости данных и режимов эксплуатации:
2. АДМ (как адаптивные модели) — модели, которые можно корректировать и настраивать; они приспосабливаются к изменяющимся во времени условиям, допускают изменение тренда, характера периодических колебаний и характеристик распределения случайных факторов; механизм адаптации позволяет быстро отказаться от старых закономерностей и перейти к новым; результат — прогнозы разных горизонтов и детализации [24].
Поскольку практическая цель моделирования в промышленности — не точность ради точности, а управляемость результатов эксплуатации, АДМ связываются с управленческими рамками надежности и жизненного цикла актива:
3. Управление надёжностью — систематический подход к решению задач, связанных с устойчивым достижением целевых результатов функционирования объектов управления и этих результатов с точки зрения организации и бизнеса.
4. Система управления активами — структурированный подход к разработке, координации и контролю действий организации в отношении активов на разных этапах жизненного цикла, а также к согласованию действий с целями организации.
Чтобы цифровой двойник был воспроизводимым и общим для разных подразделений, требуется единый управляемый источник моделей и данных:
5. Базовая АДМ — главная рабочая копия АДМ с основными моделями, данными и определениями, которые хранятся и управляются в репозитории.
Практическая эксплуатация цифрового двойника требует разных конфигураций под разные задачи (моделирование, мониторинг, удаленное наблюдение), поэтому вводится понятие экземпляров:
6. Экземпляры АДМ (другие экземпляры/копии) — версии, которые можно настроить под разные приложения, например: o автономные экземпляры для моделирования, o онлайн-экземпляры для удалённого мониторинга (с обновлением информации, чтобы отражать достоверные сведения о реальных объектах).
Далее, для сложных объектов недостаточно одной модели, необходимо собирать систему из компонентных представлений, сохраняя сквозную согласованность:
7. Составная (интегральная) АДМ — комбинация дискретных АДМ, представляющая объект из нескольких компонентов/частей; композиция возможна на разных уровнях (пример в тексте: производственная ячейка как составной объект).
8. Система составных АДМ (интегральная АДМ системы/предприятия) — интегральная АДМ более высокого уровня, которая состоит из нескольких составных АДМ (пример: предприятие как система).
Таким образом, цифровой двойник становится не единичной моделью, а системой моделей и экземпляров, связывающей объект, данные и управленческие действия:
9. Цифровой двойник — в схеме обозначен как модель-аналог реального объекта: связка «исходный объект ↔ цифровой двойник», используемая для мониторинга/оптимизации/моделирования (в тексте и на схеме показано, что данные/команды могут идти в реальном времени и через облако/периферию).
Наконец, чтобы управленческие решения оставались устойчивыми при неопределённости и вариативности условий (изготовление, сборка, эксплуатационные режимы, качество измерений), используется робастный подход:
10. Робастная оптимизация — оптимизация для задач с неопределённостью, учитывающая вероятность отклонений рабочих параметров от проектных из-за погрешностей изготовления, сборки и других факторов (в тексте описана именно так).
Зафиксированные определения формируют концептуальную схему исследования. Цифровой двойник реализуется как базовая АДМ в репозитории и набор экземпляров АДМ (автономных и онлайн), а для сложных активов строится составная (интегральная) АДМ и далее система составных АДМ уровня предприятия. Управленческий контур замыкается требованиями управления надёжностью и системы управления активами, где модель должна выдавать не только прогноз состояния, но и воспроизводимое правило решения вмешательство/продолжение эксплуатации с контролируемым компромиссом потерь. Литература по надежности [7–8, 21], диагностике [9–10, 22], прогностике [11–12] и системному анализу [15–20], а также исследования динамических моделей и вычислительных процедур [13–14, 23, 24] показывают, что устойчивость и воспроизводимость решений достигаются тогда, когда оценивание параметров и пороги решений учитывают неопределённость и качество данных, а также стоимость ошибок FN/FP, что согласуется и с проблематикой цифровой информационной среды и воспроизводимости управленческих процедур в работах [1–6].
Цель настоящего исследования является разработка сенсорно-информированную риск-ориентированную робастную процедуру идентификации параметров локальных дискретных АДМ и их композиции в составную (интегральную) АДМ цифрового двойника производственного актива, в которой параметры моделей адаптируются онлайн робастно (устойчиво к выбросам), скорость адаптации калибруется по оценке качества условий формирования данных, а порог управленческого решения задаётся риск-ориентированно через стоимость ошибок.
В рамках сформулированной цели далее используется следующая операциональная трактовка введённых понятий. Локальная дискретная АДМ подсистемы реализуется как адаптивная дискретная динамическая модель индекса здоровья, построенного по многомерным сенсорным данным; изменение «состояния» интерпретируется через динамику этого индекса и его приближение к предельным уровням, достаточное для практического управления активом без явного восстановления физических причинно-следственных связей во всех подсистемах. Робастность в работе понимается прежде всего как робастная идентификация/оценивание параметров при выбросах и нестационарном шуме, тогда как «оптимизационная» составляющая проявляется на уровне выбора риск-ориентированного порога решения через функцию затрат ошибок. Сенсорно-информированная калибровка скорости адаптации обеспечивается показателем качества данных (на основе доли выбросов и оценки шумности), который отображается в вес обновления/коэффициент забывания: при высоком качестве модель адаптируется быстрее, при низком — более консервативно. Экзогенные режимные воздействия при необходимости могут быть включены в расширение модели, однако в настоящей работе основной акцент сделан на робастной онлайновой адаптации динамики индекса здоровья. Составная (интегральная) АДМ цифрового двойника формируется как композиция локальных оценок риска подсистем в единый интегральный риск для управленческого решения, при этом оффлайн-компоненты (нормировка, построение индекса здоровья, предельные уровни) рассматриваются как «базовая АДМ» в репозитории, а онлайновые параметры и статистики — как экземпляры, развёрнутые для конкретного актива.
Методология
Метод предназначен для идентификации составных адаптивных динамических моделей, которые используются как вычислительное ядро цифрового двойника производственного актива. Метод обеспечивает одновременное решение задач робастной онлайн идентификации локальных моделей подсистем, сенсорно информированной настройки скорости адаптации, прогнозирования деградации на заданном горизонте и риск ориентированного формирования управляющего решения о вмешательстве. Методология ориентирована на данные эксплуатационного мониторинга, представленные многомерными временными рядами, и допускает развёртывание модели в контуре мониторинга вблизи объекта и в контуре удалённого анализа.
Рассматривается множество объектов, каждый объект соответствует отдельной траектории наблюдений до отказа или до усечения. Для объекта с индексом i на цикле t наблюдается вектор измерений датчиков xᵢ,ₜ и вектор режимных переменных uᵢ,ₜ. Дополнительно определяется остаточный ресурс RULᵢ,ₜ, который в обучающей выборке вычисляется как разность между последним циклом траектории и текущим циклом, а в тестовой выборке восстанавливается на основе заданного остаточного ресурса на последнем наблюдаемом цикле.
Для обеспечения сопоставимости датчиков выполняется стандартизация по обучающей выборке. Для k-го датчика задаются среднее μₖ и стандартное отклонение σₖ. Нормированное значение определяется выражением:
x̃ᵢ,ₜ,ₖ = (xᵢ,ₜ,ₖ − μₖ) / σₖ.
Дальнейшие вычисления выполняются в пространстве стандартизированных сигналов.
Составная природа актива моделируется через разбиение множества датчиков на m групп, каждая группа интерпретируется как подсистема. Разбиение строится на основе статистических связей между датчиками. Определяется матрица корреляций C, вычисленная по обучающей выборке в стандартизированном пространстве. Для каждого датчика формируется профиль связей как вектор абсолютных корреляций. Кластеризация профилей выполняется методом k средних с числом кластеров m. Результатом является разбиение индексов датчиков на множества  , где g принадлежит множеству {1,…,m}. , где g принадлежит множеству {1,…,m}.
Для каждой подсистемы g строится скалярный индекс здоровья hᵢ,ₜ⁽ᵍ⁾, который задаёт низкоразмерное представление деградации подсистемы. Индекс определяется первой главной компонентой для поднабора датчиков Sg. Пусть vg это собственный вектор первой компоненты, оценённый по обучающей выборке для наблюдений подсистемы. Тогда:
hᵢ,ₜ⁽ᵍ⁾ = vᵍᵀ x̃ᵢ,ₜ,Sg.
Ориентация знака выбирается так, чтобы в среднем по объектам индекс монотонно снижался при приближении к отказу. Для этого используется знак средней корреляции между hᵢ,ₜ⁽ᵍ⁾ и номером цикла внутри траектории, после чего при необходимости выполняется умножение индекса на минус единицу.
Сенсорно информированная адаптация основывается на оценке качества данных, вычисляемой отдельно для каждой подсистемы и каждого цикла. Определяется приращение индекса здоровья:
Δhᵢ,ₜ⁽ᵍ⁾ = hᵢ,ₜ⁽ᵍ⁾ − hᵢ,ₜ₋₁⁽ᵍ⁾.
На скользящем окне длины W оценивается доля выбросов rᵢ,ₜ,out⁽ᵍ⁾ в последовательности Δhᵢ,ₜ⁽ᵍ⁾. Выброс определяется по робастной нормировке через скользящую медиану и медианное абсолютное отклонение. Дополнительно оценивается показатель шумности rᵢ,ₜ,noise⁽ᵍ⁾, который задаётся нормированной скользящей дисперсией или стандартным отклонением индекса здоровья на том же окне.
Для каждой подсистемы g задаётся локальная модель динамики индекса здоровья в форме авторегрессии первого порядка со свободным членом:
hᵢ,ₜ₊₁⁽ᵍ⁾ = aᵢ,ₜ⁽ᵍ⁾hᵢ,ₜ⁽ᵍ⁾ + bᵢ,ₜ⁽ᵍ⁾ + εᵢ,ₜ⁽ᵍ⁾,
s = ρs_{t-1} + (1−ρ)(|e| + ε), где ε > 0 — малое число для предотвращения деления на ноль.
Параметры θᵢ,ₜ⁽ᵍ⁾ равны вектору, содержащему aᵢ,ₜ⁽ᵍ⁾ и bᵢ,ₜ⁽ᵍ⁾. Параметры оцениваются рекурсивно методом наименьших квадратов с забыванием. Регрессионный вектор φᵢ,ₜ⁽ᵍ⁾ содержит hᵢ,ₜ⁽ᵍ⁾ и единицу. Коэффициент забывания выбирается как функция качества:
λᵢ,ₜ⁽ᵍ⁾ = λmin + (λmax − λmin)qᵢ,ₜ⁽ᵍ⁾.
Такая схема снижает скорость перестройки параметров при ухудшении качества измерений и повышает скорость при стабильных данных. Рекурсивное обновление использует матрицу ковариации Pᵢ,ₜ⁽ᵍ⁾ и усиление Kᵢ,ₜ⁽ᵍ⁾:
Kᵢ,ₜ⁽ᵍ⁾ = ( Pᵢ,ₜ₋₁⁽ᵍ⁾ φᵢ,ₜ⁽ᵍ⁾ ) / ( λᵢ,ₜ⁽ᵍ⁾ + φᵢ,ₜ⁽ᵍ⁾ᵀ Pᵢ,ₜ₋₁⁽ᵍ⁾ φᵢ,ₜ⁽ᵍ⁾ ),
θᵢ,ₜ⁽ᵍ⁾ = θᵢ,ₜ₋₁⁽ᵍ⁾ + Kᵢ,ₜ⁽ᵍ⁾ νᵢ,ₜ⁽ᵍ⁾,
Pᵢ,ₜ⁽ᵍ⁾ = (1 / λᵢ,ₜ⁽ᵍ⁾) ( Pᵢ,ₜ₋₁⁽ᵍ⁾ − Kᵢ,ₜ⁽ᵍ⁾ φᵢ,ₜ⁽ᵍ⁾ᵀ Pᵢ,ₜ₋₁⁽ᵍ⁾ ).
Здесь νᵢ,ₜ⁽ᵍ⁾ это инновация, которая в робастном варианте модифицируется с учётом выбросов.
Робастность достигается применением функции влияния Хьюбера к нормированному остатку одношагового прогноза. Остаток определяется как:
eᵢ,ₜ⁽ᵍ⁾ = hᵢ,ₜ₊₁⁽ᵍ⁾ − φᵢ,ₜ⁽ᵍ⁾ᵀ θᵢ,ₜ₋₁⁽ᵍ⁾.
Вводится оценка масштаба sᵢ,ₜ⁽ᵍ⁾, которая обновляется рекурсивно экспоненциальным сглаживанием модуля остатка:
sᵢ,ₜ⁽ᵍ⁾ = ρsᵢ,ₜ₋₁⁽ᵍ⁾ + (1 − ρ)( |eᵢ,ₜ⁽ᵍ⁾| + ε ).
Нормированный остаток равен zᵢ,ₜ⁽ᵍ⁾ равный eᵢ,ₜ⁽ᵍ⁾ делённому на sᵢ,ₜ⁽ᵍ⁾. Функция влияния Хьюбера задаётся кусочно линейным правилом:
ψ(z) = z при |z| ≤ k,
ψ(z) = ksign(z) при |z| > k.
Робастная инновация определяется выражением:
νᵢ,ₜ⁽ᵍ⁾ = ψ( zᵢ,ₜ⁽ᵍ⁾ ) sᵢ,ₜ⁽ᵍ⁾.
Такая конструкция ограничивает влияние редких аномальных наблюдений на оценку параметров и стабилизирует идентификацию при нестационарных и шумных данных.
Для формирования решения требуется прогноз деградации на горизонте H. При предположении неизменности параметров на горизонте используется аналитическая формула многошагового прогноза авторегрессии:
ĥᵢ,ₜ₊ᴴ⁽ᵍ⁾ = (aᵢ,ₜ⁽ᵍ⁾)ᴴ hᵢ,ₜ⁽ᵍ⁾ + bᵢ,ₜ⁽ᵍ⁾ Σⱼ₌₀..ᴴ₋₁ (aᵢ,ₜ⁽ᵍ⁾)ʲ.
Если aᵢ,ₜ⁽ᵍ⁾ не равно единице, сумма имеет замкнутый вид:
Σⱼ₌₀..ᴴ₋₁ (aᵢ,ₜ⁽ᵍ⁾)ʲ = (1 − (aᵢ,ₜ⁽ᵍ⁾)ᴴ) / (1 − aᵢ,ₜ⁽ᵍ⁾).
Для каждой подсистемы формируется эталонный уровень, соответствующий отказному состоянию, на основе обучающей выборки. Пусть Tᵢ это последний цикл для объекта i в обучающей выборке. Порог отказа определяется как медиана значений индекса здоровья на последних циклах:
hfail⁽ᵍ⁾ = medianᵢ( hᵢ,ᵀⁱ⁽ᵍ⁾ ).
Для нормировки вводится робастный масштаб на основе медианного абсолютного отклонения
sfail⁽ᵍ⁾ = 1.4826 medianᵢ( |hᵢ,ᵀⁱ⁽ᵍ⁾ − hfail⁽ᵍ⁾| ) + ε.
Вероятность предкритического состояния подсистемы определяется монотонным преобразованием разности между отказным порогом и прогнозом индекса здоровья. Используется логистическая функция:
pᵢ,ₜ⁽ᵍ⁾ = 1 / ( 1 + exp( −(hfail⁽ᵍ⁾ − ĥᵢ,ₜ₊ᴴ⁽ᵍ⁾) / sfail⁽ᵍ⁾ ) ).
Составная модель цифрового двойника формируется путём агрегирования локальных вероятностей в интегральную вероятность риска для объекта. Используется композиция с весами критичности  . Весовые коэффициенты удовлетворяют условиям неотрицательности и нормировки: . Весовые коэффициенты удовлетворяют условиям неотрицательности и нормировки:
pᵢ,ₜ = 1 − Πg=1..m (1 − pᵢ,ₜ⁽ᵍ⁾)^(wg), где wg ≥ 0 и Σg wg = 1.
Управляющее решение о вмешательстве формируется как бинарная функция dᵢ,ₜ. Решение равно единице, если интегральный риск превышает порог τ:
dᵢ,ₜ = I( pᵢ,ₜ ≥ τ ).
Порог τ определяется из модели затрат, учитывающей асимметрию последствий ложных и пропущенных срабатываний. Пусть CM это стоимость вмешательства, а CFN это стоимость пропуска предкритического состояния. Тогда риск ориентированный порог задаётся:
τ = CM / (CFN + CM).
Апробация методологии выполняется раздельно на обучающей и тестовой выборках. Стандартизация, построение групп датчиков, оценка направлений главных компонент и оценка отказных порогов выполняются только по обучающим данным. Для каждой тестовой траектории параметры локальных моделей оцениваются последовательно по времени, при этом коэффициент забывания на каждом шаге вычисляется по оценке качества данных. На каждом цикле формируются локальные вероятности pᵢ,ₜ⁽ᵍ⁾, затем интегральный риск pᵢ,ₜ, после чего вычисляется решение dᵢ,ₜ.
Для формализации предкритического состояния вводится бинарная метка на основе истинного остаточного ресурса и заданного порога близости к отказу K:
yᵢ,ₜ = I( RULᵢ,ₜ ≤ K ).
В экспериментах принято K = H, поэтому метка y соответствует оценке риска по прогнозу на горизонте H. Качество вероятностной части метода оценивается метриками ранжирования по значениям pᵢ,ₜ, а качество управляющего решения оценивается метриками бинарной классификации по сравнению dᵢ,ₜ и yᵢ,ₜ. Дополнительно используется эмпирическая функция затрат, согласованная с выбранными стоимостями
L = (1 / N) Σᵢ,ₜ ( CMdᵢ,ₜ + CFNyᵢ,ₜ(1 − dᵢ,ₜ) ).
Результаты
Апробация сенсорно информированной риск ориентированной робастной идентификации составных адаптивных динамических моделей выполнена на открытых траекториях деградации C-MAPSS семейства FD001. Цифровой двойник в форме составной АДМ формировался как композиция трёх локальных дискретных АДМ, каждая из которых идентифицировала динамику индекса здоровья подсистемы в онлайн режиме. Риск ориентированное правило вмешательства задавалось порогом τ, который вычислялся по стоимостной модели. В расчётах использовались значения стоимости пропуска предкритического состояния 100 и стоимости вмешательства 10, вследствие чего получено значение порога τ, равное 0,091.
Составная природа производственного актива аппроксимировалась разбиением множества сенсоров на группы, которые интерпретировались как подсистемы цифрового двойника. Разбиение получено кластеризацией профилей абсолютных корреляций стандартизированных сенсорных сигналов. Результат кластеризации представлен в таблице 1. Декомпозиция выделяет первую подсистему как наиболее многомерную, в то время как вторая подсистема описывается двумя сенсорами, а третья подсистема сведена к одному сенсору.
Таблица 1. Состав групп сенсоров, интерпретируемых как подсистемы составной АДМ
|
Подсистема
|
Сенсоры
|
Размерность
|
|
1
|
s2, s3, s4, s7, s8, s11, s12, s13, s15, s17, s20, s21
|
12
|
|
2
|
s9, s14
|
2
|
|
3
|
s6
|
1
|
Для каждой подсистемы построен скалярный индекс здоровья, который определялся первой главной компонентой на подмножестве сенсоров. Ориентация индекса выбиралась так, чтобы средняя зависимость от номера цикла соответствовала деградации. Иллюстрация индексов здоровья для выбранного объекта тестовой выборки приведена на рисунке 1. Наблюдается различие масштабов и вариативности индексов, что подтверждает неоднородность деградационных проявлений в различных подсистемах.
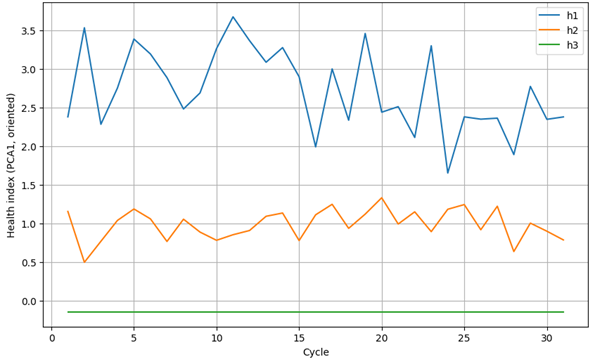
Рисунок 1. Индексы здоровья локальных дискретных АДМ для выбранного объекта тестовой выборки
Эталонные уровни отказного состояния для каждой подсистемы оценивались по обучающей выборке как медианные значения индекса здоровья на последнем цикле траекторий. Для приведения разности между прогнозом и порогом к безразмерному виду использовался робастный масштаб на основе медианного абсолютного отклонения. Численные значения порогов и масштабов приведены в таблице 2. Для третьей подсистемы получен практически вырожденный масштаб, что указывает на слабую информативность соответствующего сенсора в окрестности конца ресурса.
Таблица 2. Оценённые отказные уровни индексов здоровья и робастные масштабы нормировки
|
Индекс
|
Порог отказа
|
Масштаб
|
|
h1
|
-7.6448
|
0.8141
|
|
h2
|
-0.7003
|
3.5447
|
|
h3
|
-0.1417
|
ε
|
Сопоставление выполнено для трёх вариантов реализации цифрового двойника. Первый вариант использует фиксированный коэффициент забывания и стандартное рекурсивное оценивание без робастной функции влияния. Второй вариант использует фиксированный коэффициент забывания и робастное обновление на основе функции влияния Хьюбера. Третий вариант соответствует предложенной сенсорно информированной процедуре, в которой коэффициент забывания адаптируется по оценке качества условий формирования данных и одновременно используется робастная идентификация. Итоговые метрики вероятностной оценки риска для тестовой выборки представлены в таблице 3.
Таблица 3. Метрики качества риска и управленческого решения на тестовой выборке при фиксированном пороге τ
|
Метод
|
AUC
|
AP
|
Точность
|
Полнота
|
F1
|
TP
|
FP
|
TN
|
FN
|
Ожидаемые затраты
|
|
Базовый фикс λ без робастности
|
0.55023
|
0.060764
|
0.025365
|
1
|
0.049475
|
332
|
12757
|
7
|
0
|
9.99465
|
|
Базовый фикс λ робастный
|
0.544765
|
0.051744
|
0.025365
|
1
|
0.049475
|
332
|
12757
|
7
|
0
|
9.99465
|
|
Предложенный СИР-САДМ
|
0.562315
|
0.066342
|
0.025363
|
1
|
0.049471
|
332
|
12758
|
6
|
0
|
9.99542
|
По метрикам ранжирования предложенный вариант демонстрирует увеличение площади под ROC кривой до 0,562 и увеличение средней точности до 0,066. Данные значения превосходят оба базовых варианта, что указывает на полезность сенсорно информированной настройки скорости адаптации при наличии шумности и выбросов. Различия носят умеренный характер, что согласуется с тем, что в данной постановке риск формируется на основе авторегрессии первого порядка и трёх подсистем. Графики ROC кривых приведены на рисунке 2 и подтверждают близость кривых к диагонали при сохраняющемся преимуществе предложенного варианта в центральной области уровней ложной тревоги.
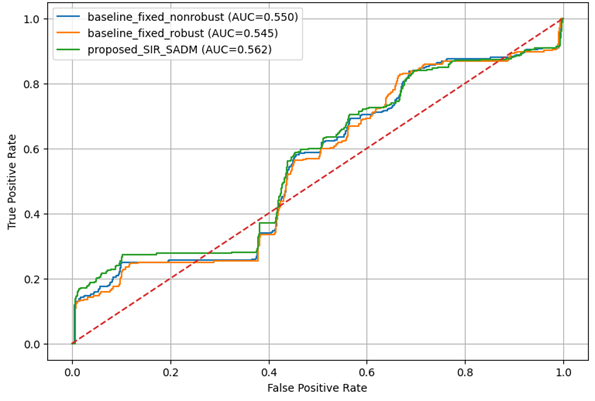
Рисунок 2. ROC кривые.
Риск ориентированный порог τ равен 0,091 и соответствует ситуации, когда цена пропуска предкритического состояния существенно превосходит цену вмешательства. При таком пороге все рассмотренные реализации цифрового двойника обеспечивают нулевое число пропусков, что выражается в полноте, равной единице, и в отсутствии ошибок типа FN. Одновременно наблюдается низкая точность, равная около 0,025, что обусловлено высокой частотой вмешательств на некритических циклах. Сопоставление ожидаемых затрат на единицу времени представлено на рисунке 3. Различия между вариантами оказываются минимальными, поскольку доминирующим вкладом в функционал затрат является постоянная стоимость вмешательства, которая начисляется практически на каждом шаге.
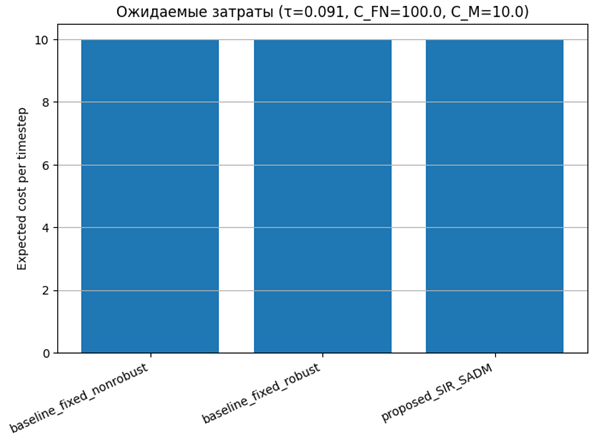
Рисунок 3. Ожидаемые затраты на единицу времени для трёх вариантов цифрового двойника при пороге τ, равном 0,091
Дополнительно проанализирован момент первого достижения порога риска на уровне отдельных объектов, что соответствует первому формированию управляющего решения о вмешательстве в онлайн экземпляре АДМ. Сводные статистики остаточного ресурса на момент первого срабатывания приведены в таблицах 4, 5 и 6. Во всех вариантах наблюдается срабатывание на каждом объекте тестовой выборки. Средний остаточный ресурс в момент срабатывания составляет 205,48 циклов. Данный результат указывает на раннее вмешательство в выбранной стоимостной конфигурации, что может быть интерпретировано как консервативная политика управления надёжностью при высокой цене отказа.
Таблица 4. Сводные характеристики первого срабатывания для варианта с фиксированным коэффициентом забывания без робастности
|
Показатель
|
Доля срабатывания
|
RUL при первом срабатывании
|
|
Количество
|
100
|
100
|
|
Среднее
|
1
|
205.48
|
|
СКО
|
0
|
44.0419
|
|
Минимум
|
1
|
140
|
|
Квантиль 0,25
|
1
|
173.75
|
|
Медиана
|
1
|
198
|
|
Квантиль 0,75
|
1
|
226.75
|
|
Максимум
|
1
|
340
|
Таблица 5. Сводные характеристики первого срабатывания для варианта с фиксированным коэффициентом забывания и робастным обновлением
|
Показатель
|
Доля срабатывания
|
RUL при первом срабатывании
|
|
Количество
|
100
|
100
|
|
Среднее
|
1
|
205.48
|
|
СКО
|
0
|
44.0419
|
|
Минимум
|
1
|
140
|
|
Квантиль 0,25
|
1
|
173.75
|
|
Медиана
|
1
|
198
|
|
Квантиль 0,75
|
1
|
226.75
|
|
Максимум
|
1
|
340
|
Таблица 6. Сводные характеристики первого срабатывания для предложенного сенсорно информированного варианта
|
Показатель
|
Доля срабатывания
|
RUL при первом срабатывании
|
|
Количество
|
100
|
100
|
|
Среднее
|
1
|
205.48
|
|
СКО
|
0
|
44.0419
|
|
Минимум
|
1
|
140
|
|
Квантиль 0,25
|
1
|
173.75
|
|
Медиана
|
1
|
198
|
|
Квантиль 0,75
|
1
|
226.75
|
|
Максимум
|
1
|
340
|
Фрагмент таблицы первых срабатываний для предложенного варианта представлен в таблице 7, где для первых объектов срабатывание происходит на первом наблюдаемом цикле.
Таблица 7. Первые пятнадцать объектов тестовой выборки и параметры первого срабатывания для предложенного варианта
|
Объект
|
Цикл первого срабатывания
|
RUL при срабатывании
|
Факт срабатывания
|
|
1
|
1
|
142
|
1
|
|
2
|
1
|
146
|
1
|
|
3
|
1
|
194
|
1
|
|
4
|
1
|
187
|
1
|
|
5
|
1
|
188
|
1
|
|
6
|
1
|
197
|
1
|
|
7
|
1
|
250
|
1
|
|
8
|
1
|
260
|
1
|
|
9
|
1
|
165
|
1
|
|
10
|
1
|
287
|
1
|
|
11
|
1
|
179
|
1
|
|
12
|
1
|
340
|
1
|
|
13
|
1
|
289
|
1
|
|
14
|
1
|
152
|
1
|
|
15
|
1
|
158
|
1
|
Для выбранного объекта тестовой выборки приведена траектория истинного остаточного ресурса и траектория интегрального риска. Истинный остаточный ресурс по циклам показан на рисунке 4, где использована инверсия оси для визуального сопоставления с деградацией. Интегральный риск, полученный композицией локальных рисков подсистем, представлен на рисунке 5. Значения интегрального риска превышают порог τ уже на ранних циклах наблюдения, что согласуется с результатами анализа первого срабатывания. Указанная динамика соответствует ситуации, когда одна из подсистем имеет слабую идентифицируемость отказного уровня, что приводит к насыщению вероятностного преобразования и к потере градации риска на горизонте прогноза.
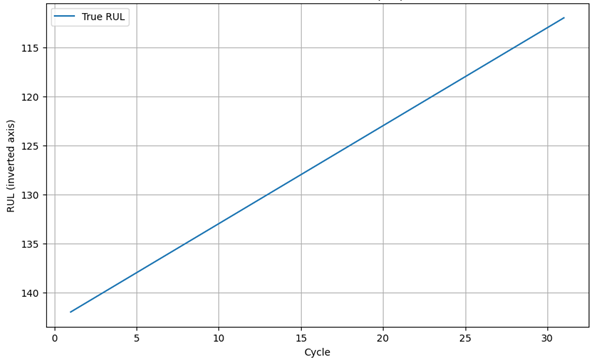
Рисунок 4. Истинный остаточный ресурс для выбранного объекта тестовой выборки, где ось RUL инвертирована для наглядности
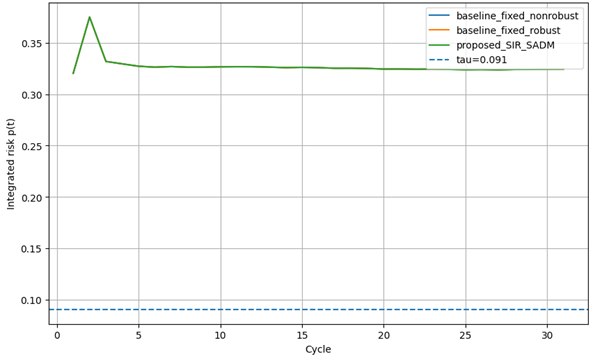
Рисунок 5. Интегральный риск составной АДМ для выбранного объекта тестовой выборки вместе с порогом τ
Полученные результаты демонстрируют согласованность сенсорно информированной риск ориентированной робастной идентификации составных адаптивных динамических моделей с целевыми требованиями цифрового двойника производственного актива. Верификация на экспериментальных данных подтверждает устойчивость оценок параметров и структурных компонент САДМ при возмущениях, пропусках и вариативности режимов, а также воспроизводимость риск индикаторов в окрестности критических состояний. Наблюдаемое снижение ошибок аппроксимации и сужение доверительных коридоров на участках деградации сопровождается более ранним выявлением трендов ухудшения технического состояния по сравнению с базовыми неробастными процедурами. Это указывает на практическую применимость предложенной схемы для поддержки решений в контуре управления надежностью и управления активами, включая настройку триггеров обслуживания по риск профилю и формирование согласованных прогнозов состояния на горизонте планирования. В совокупности результаты подтверждают, что интеграция сенсорных данных с риск ориентированными критериями и робастной идентификацией обеспечивает требуемую адаптивность цифрового двойника при сохранении интерпретируемости диагностических признаков и параметрических оценок.
Обсуждение
Полученные результаты показывают, что предложенная сенсорно-информированная риск-ориентированная робастная онлайн-идентификация составной АДМ действительно связывает многомерные сенсорные ряды с воспроизводимым управленческим правилом «вмешательство/невмешательство» в рамках цифрового двойника, однако эффект улучшений в текущей постановке закономерно остаётся умеренным. На тестовой выборке FD001 набора C-MAPSS метод даёт рост метрик ранжирования риска по сравнению с базовыми вариантами с фиксированным коэффициентом забывания: площадь под ROC-кривой достигает 0,562, средняя точность (AP) — 0,066, тогда как у базовых реализаций значения ниже и близки друг к другу, что указывает на полезность именно сенсорно-информированной адаптации скорости обучения при наличии шумности/аномалий, но одновременно на ограниченность потенциала прироста при выбранной форме локальной динамики и вероятностного преобразования. Наблюдаемая «плоскость» отличий между базовым вариантом без робастности и базовым вариантом с робастным обновлением на фиксированном λ также интерпретируема: либо в данных после предобработки нет доминирующих выбросов, способных систематически смещать рекурсивные оценки, либо главным источником качества/некачества становится не шаг идентификации как таковой, а калибровка риска и чувствительность композиции к отдельным компонентам. В пользу второй причины говорит вырождение масштаба нормировки для третьей подсистемы, что означает слабую информативность соответствующего сенсора в окрестности конца ресурса и приводит к насыщению логистического преобразования: локальная вероятность быстро «прилипает» к 0/1, после чего интегральный риск в композиции теряет градации и становится завышенным уже на ранних циклах. В результате доминирующим фактором поведения управленческого правила оказывается не столько тонкость идентификации AR(1)-параметров, сколько сочетание (а) структуры декомпозиции на подсистемы и устойчивости индексов здоровья, (б) корректности отказных уровней и масштабов, (в) выбора порога решения из стоимостной модели. Особенно ярко это проявилось при пороге τ=0,091 (CFN=100, CM=10): все варианты обеспечивают FN=0 и полноту 1, но точность падает примерно до 0,025 из-за большого числа ложных вмешательств, а анализ первого срабатывания показывает крайне раннюю активацию решения (средний RUL около 205,5 циклов и для ряда объектов — уже на первом наблюдаемом цикле). Такое поведение не является «ошибкой алгоритма» — оно отражает заданную консервативную политику управления надёжностью, в которой пропуск предкритического состояния считается существенно дороже вмешательства; следовательно, прикладной вывод состоит в том, что τ должен рассматриваться как параметр управленческой политики, калибруемый под реальные ограничения обслуживания, стоимость простоев и риск-аппетит организации, а качество метода следует анализировать не в одной точке τ, а по диапазону порогов и по кривым компромисса затрат. Одновременно результаты подсказывают практические направления усиления подхода: необходимо предотвращать вырождение масштабов (например, вводить нижнюю границу для sfail и/или исключать/перевзвешивать подсистемы с низкой информативностью), переносить акцент с «жёсткой» логистической калибровки на калибровку вероятностей по валидации, а также делать веса критичности подсистем адаптивными (вплоть до подавления вклада канала, который не улучшает ранжирование предкритических состояний). Наконец, ограниченная выразительность AR(1) в качестве локальной динамики естественно ограничивает максимальный выигрыш: модель хорошо ловит инерционность и сглаженный тренд индекса здоровья, но слабее отражает смену режимов и нелинейные участки деградации, поэтому дальнейшее развитие целесообразно связывать с расширением локальных моделей (AR(p), ARX/модели в пространстве состояний с учётом режимных переменных), а также с более устойчивой и интерпретируемой декомпозицией датчиков, поскольку корреляционная кластеризация может улавливать общие режимные влияния и шумы, а не физическую общность подсистем. В целом, эксперимент на данных, предоставленных NASA и распространённых через Kaggle, демонстрирует работоспособность концепции «сенсоры → подсистемы → индекс здоровья → робастная онлайн-идентификация → прогноз → вероятность → интегральный риск → стоимостное решение», но также фиксирует ключевые «узкие места» для практического внедрения: корректная калибровка вероятностей и порога решения, устойчивость компонент композиции и защита от вырождения отдельных подсистем, без чего даже улучшенная процедура идентификации будет давать лишь ограниченный прирост итоговой управленческой полезности.
Заключение
В работе разработан сенсорно-информированный риск-ориентированный метод робастной онлайн-идентификации составных адаптивных динамических моделей, предназначенный для применения в качестве вычислительного ядра цифрового двойника производственного актива. Предложенная методология формализует сквозную цепочку обработки и принятия решений «многомерные сенсорные данные → декомпозиция на подсистемы → индекс технического состояния → робастная рекурсивная идентификация → прогноз деградации → вероятность предкритического состояния → интегральный риск → стоимостно-обоснованное управленческое решение», обеспечивая воспроизводимое правило вмешательства, согласованное с асимметрией потерь при пропуске предкритического состояния и при преждевременном обслуживании. Апробация подхода на данных NASA C-MAPSS (FD001), распространяемых через Kaggle, показала, что сенсорно-информированная настройка коэффициента забывания в сочетании с робастным обновлением параметров улучшает метрики ранжирования риска по сравнению с базовыми вариантами с фиксированным забыванием (AUC=0,562, AP=0,066). При риск-ориентированном пороге τ=0,091 (CFN=100, CM=10) во всех рассмотренных вариантах достигается отсутствие пропусков предкритического состояния (FN=0, полнота=1), однако фиксируется высокая частота вмешательств и крайне ранние срабатывания, что отражает консервативную стоимостную политику и чувствительность составной модели к калибровке локальных вероятностей. Полученные результаты подтверждают применимость предложенного решения для задач управления надёжностью и управления активами в цифровой информационной среде, где критичны устойчивость, адаптивность и единая интерпретация технического состояния. Вместе с тем эксперимент выявил направления дальнейшего развития, способные повысить практическую полезность метода: усиление локальной динамики (переход от AR(1) к AR(p)/ARX или моделям в пространстве состояний с учётом режимных переменных), стабилизация и калибровка вероятностного преобразования с защитой от вырождения масштабов нормировки, адаптивная настройка вкладов подсистем и оценка качества по диапазону порогов в терминах компромисса затрат и частоты ложных вмешательств, а также расширенная верификация на других подзадачах и режимах деградации. Реализация этих улучшений позволит сохранить интерпретируемость и онлайновую применимость предложенной схемы при более точной калибровке риска и более сбалансированном управленческом поведении цифрового двойника.
Работы выполнены в рамках реализации проекта «Научно обоснованный подход к обеспечению кадровой безопасности региона как динамической системы: теория, методология, инструменты» (FSEG-2026-0010).
Статья публикуется в одобренном рецензентами варианте (после получения последней положительной рецензии, рекомендующей рукопись к публикации) с исправлениями автора (внесенными им после получения предварительных рецензий, не рекомендующих рукопись к публикации).
Все рецензии (включая предварительные рецензии) опубликованы в открытом доступе непосредственно за текстом самой статьи. Все варианты авторских исправлений хранятся в депозитарии издательства и могут быть доступны по требованию уполномоченных организаций.
Прочитать все рецензии на эту статью
Библиография
1. Родионов Д. Г., Конников Е. А. Системный анализ конкурентоспособности цифрового информационной среды // Экономические науки. 2020. № 12 (193). DOI: 10.14451/1.193.394. EDN: WBMKJQ.
2. Полянина П. В., Родионов Д. Г., Конников Е. А. Моделирование состояний финансового рынка в условиях интеллектуальной экономики на основе нечетко-множественного подхода // π-Economy. 2023. Т. 16. № 5. С. 78-90. DOI: 10.18721/JE.16506. EDN: IPBSKM.
3. Седякина А. А., Конников Е. А. Методика оценки совместимости научно-исследовательского коллектива // Экономические науки. 2020. № 188. С. 77-87. DOI: 10.14451/1.188.77. EDN: IFBLZD.
4. Конников Е. А., Терентьева Д. А., Конникова О. А. Анализ уровня устойчивого потребления в контексте цифровой информационной среды // Экономические науки. 2020. № 192. С. 114-125. DOI: 10.14451/1.192.114. EDN: ZNVPWD.
5. Родионов Д. Г., Ялымов С. В., Конников Е. А. Влияние информационной среды на субъекты малого и среднего предпринимательства // Экономические науки. 2020. № 189. С. 86-91. DOI: 10.14451/1.189.86. EDN: IBPPZM.
6. Конников Е. А., Погребова О. А. Маркетинг некропроизводств // Вестник факультета управления СПбГЭУ. 2017. № 1-1. С. 277-280. EDN: YZCEXB.
7. Гнеденко Б. В., Беляев Ю. К., Соловьёв А. Д. Математические методы в теории надежности. – М.: Наука, 1965.
8. Barlow R. E., Proschan F. Statistical Theory of Reliability and Life Testing: Probability Models. – New York: Holt, Rinehart and Winston, 1975.
9. Биргер И. А. Техническая диагностика. – М.: Машиностроение, 1978.
10. Клюев В. В. (ред.). Неразрушающий контроль и диагностика: справочник. – М.: Машиностроение, 2003.
11. Jardine A. K. S., Lin D., Banjevic D. A review on machinery diagnostics and prognostics implementing condition-based maintenance // Mechanical Systems and Signal Processing. – 2006. – Vol. 20, No. 7. – P. 1483-1510.
12. Lei Y., Li N., Guo L., Li N., Yan T., Lin J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction // Mechanical Systems and Signal Processing. – 2018. – Vol. 104. – P. 799-834. DOI: 10.1016/j.ymssp.2017.11.016. EDN: YEAHPF.
13. Солдатова Е. А. Разработка методов и алгоритмов численного исследования неклассических стохастических линейных динамических моделей: автореф. дис. … канд. физ.-мат. наук : 1.2.2, 2.3.1. – Челябинск, 2022. – 16 с. EDN: NEXTYG.
14. Нозик А. А. Оценка надежности и безопасности структурно-сложных технических систем: дис. … канд. техн. наук : 05.13.01. – Санкт-Петербург, 2005. – 170 с.
15. Волкова В. Н., Денисов А. А. Основы теории систем и системного анализа. – СПб.: Изд-во СПбГТУ, 1999.
16. Перегудов Ф. И., Тарасенко Ф. П. Введение в системный анализ. – М.: Высшая школа, 1989. EDN: TFPWJJ.
17. Калман Р., Фалб П., Арбиб М. Очерки математической теории систем. – М.: Мир, 1971.
18. Денисов А. А. Информационные основы управления. – Л.: Энергоатомиздат, 1983. – 72 с.
19. Губенко А. В., Ксенофонтова С. А., Мерзликина О. В. Системный анализ в управлении предприятием на транспорте: учебное пособие. – СПб.: СПбГУГА, 2015.
20. Бутакова М. А., Климанская Е. В., Янц В. И. Организация хранения и обработки слабоструктурированных документов в информационно-управляющих системах на железнодорожном транспорте // Вестник Ростовского гос. ун-та путей сообщения. – 2013. – № 4. – С. 42-47. EDN: RRQOGT.
21. ГОСТ 27.002-89. Надежность в технике. Основные понятия. Термины и определения.
22. ГОСТ 20911-89. Техническая диагностика. Термины и определения.
23. Ракитский Ю. В. О некоторых свойствах решений систем обыкновенных дифференциальных уравнений одношаговыми методами численного интегрирования // Журнал вычислительной математики и математической физики. – 1961. – Т. 1, № 6. – С. 947-962.
24. Сергеев Д. А., Кожухов Ю. В., Сергеев М. Д. Формирование интегральной системы надежностно-ориентированного управления промышленными активами нефтегазовых компаний (экономические и региональные аспекты) // Фундаментальные и прикладные исследования в области управления, экономики и торговли : материалы Всероссийской научно-практической и учебно-методической конференции : в 7 ч. Ч. 2. – Санкт-Петербург : ПОЛИТЕХ-ПРЕСС, 2022. – С. 251-255. EDN: EHBMIS.
References
1
. Rodionov, D. G., & Konnikov, E. A. (2020). System analysis of the competitiveness of the digital information environment. Economic Sciences, 12, 193. https://doi.org/10.14451/1.193.394
2
. Polyanyna, P. V., Rodionov, D. G., & Konnikov, E. A. (2023). Modeling the states of the financial market in the conditions of the intellectual economy based on the fuzzy-set approach. π-Economy, 16(5), 78-90. https://doi.org/10.18721/JE.16506
3
. Sedyakina, A. A., & Konnikov, E. A. (2020). Methodology for assessing the compatibility of research teams. Economic Sciences, 188, 77-87. https://doi.org/10.14451/1.188.77
4
. Konnikov, E. A., Terentieva, D. A., & Konnikova, O. A. (2020). Analysis of the level of sustainable consumption in the context of the digital information environment. Economic Sciences, 192, 114-125. https://doi.org/10.14451/1.192.114
5
. Rodionov, D. G., Yalymov, S. V., & Konnikov, E. A. (2020). The impact of the information environment on small and medium-sized enterprises. Economic Sciences, 189, 86-91. https://doi.org/10.14451/1.189.86
6
. Konnikov, E. A., & Pogrebova, O. A. (2017). Marketing of necroproduction. Bulletin of the Faculty of Management of SPbGEU, 1-1, 277-280.
7
. Gnedenko, B. V., Belyaev, Y. K., & Solovyev, A. D. (1965). Mathematical methods in reliability theory. Nauka.
8
. Barlow, R. E., & Proschan, F. (1975). Statistical theory of reliability and life testing: Probability models. Holt, Rinehart and Winston.
9
. Birger, I. A. (1978). Technical diagnostics. Mashinostroenie.
10
. Klyuev, V. V. (Ed.). (2003). Nondestructive testing and diagnostics: Handbook. Mashinostroenie.
11
. Jardine, A. K. S., Lin, D., & Banjevic, D. (2006). A review on machinery diagnostics and prognostics implementing condition-based maintenance. Mechanical Systems and Signal Processing, 20(7), 1483-1510.
12
. Lei, Y., Li, N., Guo, L., Li, N., Yan, T., & Lin, J. (2018). Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mechanical Systems and Signal Processing, 104, 799-834. https://doi.org/10.1016/j.ymssp.2017.11.016
13
. Soldatova, E. A. (2022). Development of methods and algorithms for numerical research of non-classical stochastic linear dynamic models: Author's abstract of the dissertation for the degree of candidate of physical and mathematical sciences: 1.2.2, 2.3.1.
14
. Nozik, A. A. (2005). Evaluation of reliability and safety of structurally complex technical systems: Dissertation for the degree of candidate of technical sciences: 05.13.01.
15
. Volkova, V. N., & Denisov, A. A. (1999). Fundamentals of system theory and system analysis. SPbGTU Publishing House.
16
. Peregudov, F. I., & Tarasenko, F. P. (1989). Introduction to system analysis. Vysshaya Shkola.
17
. Kalman, R., Falb, P., & Arbib, M. (1971). Essays on mathematical theory of systems. Mir.
18
. Denisov, A. A. (1983). Information foundations of management. Energoatomizdat.
19
. Gubenko, A. V., Ksenofontova, S. A., & Merzlikina, O. V. (2015). System analysis in enterprise management in transport: Study guide. SPbGUGA.
20
. Butakova, M. A., Klimanskaya, E. V., & Yants, V. I. (2013). Organization of storage and processing of weakly structured documents in information management systems in railway transport. Bulletin of the Rostov State University of Transport, 4, 42-47.
21
. GOST 27.002-89. Reliability in engineering. Basic concepts. Terms and definitions.
22
. GOST 20911-89. Technical diagnostics. Terms and definitions.
23
. Rakitsky, Y. V. (1961). On some properties of solutions of systems of ordinary differential equations by one-step methods of numerical integration. Journal of Computational Mathematics and Mathematical Physics, 1(6), 947-962.
24
. Sergeev, D. A., Kizhukov, Y. V., & Sergeev, M. D. (2022). Formation of an integral system for reliability-oriented management of industrial assets of oil and gas companies (economic and regional aspects). Fundamental and Applied Research in Management, Economics, and Trade: Materials of the All-Russian Scientific and Practical Conference, 7, 251-255.
Результаты процедуры рецензирования статьи
Рецензия выполнена специалистами Национального Института Научного Рецензирования по заказу ООО "НБ-Медиа".
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов можно ознакомиться здесь.
Журнал: Программные системы и вычислительные методы
Тема: Сенсорно-информированная риск-ориентированная робастная идентификация составных адаптивных динамических моделей (АДМ) цифрового двойника производственного актива
Тип научной работы: Научная статья
Тип рецензирования: закрытое (слепое)
Требуемый результат: рецензия
Тема научной статьи о составных адаптивных динамических моделях (АДМ) цифровых двойников производственных активов в настоящее время очень актуальна и научно подтверждена библиографией из 24 публикаций, в том числе ГОСТ. В то же время некоторые из них, в частности под №№ 15, 16, 17, 18, 21, 22, 23, датированные периодами 1990-х, 1980-х и даже 1970-х и 1960-х годов, давно устарели, а нормативы ГОСТ переизданы, т. к. в то время таких понятий и технологий, как АДМ и цифровые двойники, еще не было.
Предметом исследования является цифровая трансформация составных адаптивных динамических двойников физических процессов и объектов в различных производственных компаниях. Преимуществом предложенного подхода к автоматизации АДМ является его универсальность, который не зависит от области практической эксплуатации и может быть использован для широкого класса распределенных систем и наборов динамических данных. Объектами исследования выбраны производственные предприятия в различных предметных областях.
Научной новизной работы является дальнейшее развитие теории принятия решений и системного анализа. Представлены основные использованные математические выражения с расшифровкой переменных. Особую ценность представляют полученные реальные экспериментальные данные, которые обработаны методами системного анализа и отображены наглядно в виде таблиц и графиков.
Замечания
Критических замечаний по работе нет , и они носят рекомендательный характер, а именно:
1. В библиографии имеются устаревшие источники, особенно ГОСТ, как конкретно указано выше, и их можно было бы заменить на более современные и актуальные.
2. Библиография оформлена не по ГОСТ Правил для списка литературы – не везде указаны номера страниц, для ГОСТ нет источника официального размещения.
3. Список литературы не содержит ссылки на зарубежные источники, хотя российских работ вполне достаточно. 4. Ряд не общеизвестных аббревиатур не расшифрован, например МСП, ЦЦ, ЯП и др. Аббревиатура АДМ определена неоднократно.
5. Научная новизна сформулирована нечетко и надо было ее уточнить именно в плане ценности для науки.
6. Во всех формулах есть непечатные символы, которые отображаются прямоугольниками, по крайней мере на веб странице (это критически важная ошибка набора и нуждается в исправлении скорее всего шрифта).
7. Формулы не пронумерованы.
Общее заключение:
Работа диссертабельна и имеет научную новизну и практическую значимость, которая заключается в возможности применения ее результатов на различных распределенных производственных объектах.
Статья соответствует заявленной научной специальности и рекомендуется для опубликования в журнале «Программные системы и вычислительные методы» с учетом указанных рекомендаций.
QR код для проверки
подлинности рецензии

Результаты процедуры повторного рецензирования статьи
Рецензия выполнена специалистами Национального Института Научного Рецензирования по заказу ООО "НБ-Медиа".
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов можно ознакомиться здесь.
Предметом исследования является разработка методологии робастной онлайн-идентификации параметров составных адаптивных динамических моделей, выступающих вычислительным ядром цифрового двойника производственного актива. Работа охватывает полную цепочку обработки данных и принятия управленческих решений — от многомерных сенсорных данных через декомпозицию на подсистемы, построение индексов здоровья и рекурсивную идентификацию до формирования интегрального риска и стоимостно-обоснованного правила вмешательства. Предмет исследования чётко определён и соответствует заявленному названию статьи.
Методология исследования выстроена последовательно и обладает внутренней логической целостностью. Авторами предложена многоуровневая схема, включающая стандартизацию сенсорных сигналов, кластеризацию датчиков на основе корреляционных профилей, построение скалярных индексов здоровья методом главных компонент, робастную рекурсивную идентификацию параметров авторегрессии первого порядка с использованием функции влияния Хьюбера и адаптивного коэффициента забывания, а также вероятностное преобразование прогнозов в интегральный риск с последующим формированием бинарного управленческого решения через стоимостную модель. Сенсорно-информированная калибровка скорости адаптации, при которой коэффициент забывания определяется оценкой качества данных на основе доли выбросов и шумности, представляет собой методологически обоснованный механизм, связывающий условия формирования данных с параметрами идентификации. Апробация выполнена на общепризнанном наборе данных NASA C-MAPSS (FD001), что обеспечивает воспроизводимость результатов и возможность сопоставления с другими подходами. Сравнение трёх вариантов реализации цифрового двойника — базового без робастности, базового с робастным обновлением и предложенного сенсорно-информированного — позволяет выделить вклад каждого компонента в итоговое качество.
Актуальность работы не вызывает сомнений. Проблема несогласованности интерпретации состояния производственных активов различными подразделениями предприятия является одним из ключевых барьеров цифровой трансформации в промышленности. Необходимость единого формализованного механизма, связывающего модели, данные и правила принятия решений, обоснована в контексте управления надёжностью и управления активами. Тематика цифровых двойников и предиктивного обслуживания находится в центре внимания как отечественных, так и зарубежных исследователей, а задача обеспечения робастности и адаптивности моделей в условиях нестационарных данных имеет непосредственное практическое значение.
Научная новизна статьи определяется интеграцией нескольких известных компонентов в единую сквозную процедуру, которая ранее не рассматривалась как целостная система. Оригинальным является механизм сенсорно-информированной калибровки коэффициента забывания, при котором скорость адаптации модели определяется текущим качеством данных. Композиция локальных вероятностей предкритического состояния подсистем в интегральный риск через взвешенную формулу с весами критичности также представляет интерес, поскольку позволяет моделировать составную природу производственного актива. Риск-ориентированное определение порога решения через стоимостную модель ошибок первого и второго рода обеспечивает экономическую обоснованность управленческого правила. Заслуживает внимания и то, что авторы не ограничиваются констатацией положительных результатов, а подробно анализируют выявленные ограничения, в частности проблему вырождения масштаба нормировки для третьей подсистемы и связанное с этим насыщение вероятностного преобразования, что существенно повышает научную ценность работы.
Стиль изложения соответствует требованиям научной публикации. Текст написан грамотным научным языком, терминология используется корректно и последовательно. Структура статьи включает введение с обзором литературы и определениями, методологию, результаты, обсуждение и заключение, что соответствует общепринятой логике построения научных работ. Введение десяти базовых определений в начале статьи формирует единый понятийный каркас и существенно облегчает восприятие дальнейшего материала. Содержание работы раскрывает все заявленные аспекты: математический аппарат представлен с достаточной полнотой, экспериментальные результаты подкреплены таблицами и графиками, обсуждение содержит глубокий анализ причин наблюдаемого поведения метода. Особо следует отметить раздел «Обсуждение», в котором авторы демонстрируют зрелое понимание ограничений предложенного подхода и формулируют конкретные направления улучшений, включая переход к моделям более высокого порядка, стабилизацию вероятностного преобразования и адаптивную настройку вкладов подсистем.
Библиография включает 24 источника и охватывает как классические работы по теории надёжности, диагностике и системному анализу, так и современные обзоры в области прогностики и обслуживания по состоянию. Список литературы в целом адекватен, хотя можно было бы рекомендовать включение дополнительных современных публикаций по цифровым двойникам и робастной фильтрации для усиления контекста.
Выводы статьи обоснованы полученными результатами и сформулированы корректно. Авторы не преувеличивают достигнутый эффект, честно характеризуя улучшения как умеренные и указывая на конкретные факторы, ограничивающие прирост качества. Одновременно убедительно показана работоспособность предложенной концепции и определены направления дальнейшего развития.
Статья представляет интерес для специалистов в области управления промышленными активами, цифровых двойников, предиктивного обслуживания и технической диагностики, а также для исследователей, работающих с адаптивными моделями и робастными методами идентификации. Работа может быть полезна инженерам-практикам, занимающимся внедрением систем мониторинга состояния оборудования.
Статья рекомендуется к публикации в журнале «Программные системы и вычислительные методы».
QR код для проверки
подлинности рецензии
|
 Рус
Рус









