|
Программные системы и вычислительные методы
Правильная ссылка на статью:
Притыкин Ф.Н., Нефедов Д.И.
Исследование геометрических параметров задающих область разрешенных конфигураций при изменении положения запретных зон
// Программные системы и вычислительные методы.
2018. № 4.
С. 48-59.
DOI: 10.7256/2454-0714.2018.4.25176 URL: https://nbpublish.com/library_read_article.php?id=25176
Исследование геометрических параметров задающих область разрешенных конфигураций при изменении положения запретных зон
Притыкин Федор Николаевич
доктор технических наук
профессор, Омский государственный технический университет
644050, Россия, Омская область, г. Омск, проспект Мира, 11, ауд. Зв-516
Pritykin Fedor Nikolaevich
Doctor of Technical Science
Professor, Omsk State Technical University
644050, Russia, Omskaya oblast', g. Omsk, ul. Prospekt Mira, 11, aud. Zv-516

|
pritykin@mail.ru
|
|
 |
Другие публикации этого автора
|
|
|
Нефедов Дмитрий Игоревич
аспирант, Омский государственный технический университет
644050, Россия, Омская область, г. Омск, проспект Мира, 11
Nefedov Dmitrii Igorevich
Graduate student, Omsk State Technical University
644050, Russia, Omskaya oblast', g. Omsk, ul. Prospekt Mira, 11
|
|
3demon@bk.ru
|
|
|
Другие публикации этого автора
|
|
|
DOI: 10.7256/2454-0714.2018.4.25176
Дата направления статьи в редакцию:
09-01-2018
Дата публикации:
10-01-2019
Аннотация:
Предметом исследования является модуль автоматического обнаружения столкновений механизма манипулятора, с запретными зонами используемый в в базе знаний интеллектуальных системах управления роботами. Объектом исследования является область разрешенных конфигураций, заданная в пространстве обобщенных координат. Авторы подробно рассматривают такие аспекты как параметрическое задание области разрешенных конфигураций при наличии запретных зон в рабочем пространстве механизма манипулятора. Предложено использовать достаточное условие определения столкновений механизма манипулятора и запретных зон, основанное на использовании области разрешенных конфигураций. Методология исследования основана на изучении сечений задающих форму и положение области разрешенных конфигураций. Все разрешенные конфигурации в пространстве обобщенных координат, отображены геометрическим объектом. Данный геометрический объект задан аналитическим способом с помощью использования нескольких кинематических поверхностей, его ограничивающих. Приведены результаты моделирования, которые позволили разработать параметрический способ задания совокупности сечений, задающих форму и положение области разрешенных конфигураций при различном положении запретных зон. Основным выводом проведенного исследования является сокращение времени расчетов тестовых заданий, связанных с виртуальным моделированием движения механизма манипулятора мобильного робота «Варан» при использовании разработанного алгоритма обнаружения столкновений механизма со средой. Особым вкладом авторов в исследование темы является разработка параметрического способа задания области разрешенных конфигураций, используемой при интеллектуальном управлении движением механизма манипулятора в заранее известной внешней среде. Новизна исследований заключается в разработке более производительного метода анализа информации о положении механизма манипулятора и запретных зон на основе полученных аналитических зависимостей.
Ключевые слова:
пространство обобщенных координат, область разрешенных конфигураций, кинематические поверхности, виртуальное моделирование, синтез движений роботов, запретные зоны, механизм манипулятора, вектор скоростей, параметры формы образующих, параметры положения образующих
Abstract: The subject of the research is the automatic collision detection mechanism of the manipulator mechanism, with restricted zones used in the knowledge base of intelligent robot control systems. The object of the study is the area of allowed configurations defined in the space of generalized coordinates. The authors consider in detail such aspects as the parametric specification of the area of allowed configurations in the presence of forbidden zones in the working space of the manipulator mechanism. It is proposed to use a sufficient condition for determining the collisions of the manipulator mechanism and the forbidden zones, based on the use of the area of allowed configurations. The research methodology is based on the study of sections defining the shape and position of the region of allowed configurations. All allowed configurations in the space of generalized coordinates are displayed as a geometric object. This geometric object is specified in an analytical way by using several kinematic surfaces that limit it. The simulation results are given, which allowed us to develop a parametric method for specifying a set of sections that define the shape and position of the region of allowed configurations for different positions of the forbidden zones. The main conclusion of the study is to reduce the calculation time of test tasks related to virtual modeling of the movement of the Varan mobile robot arm mechanism using the developed mechanism for collision detection of the mechanism with the environment. A special contribution of the authors to the study of the topic is the development of a parametric method for defining the area of allowed configurations used in the intelligent control of the motion of the manipulator mechanism in a previously known external environment. The novelty of the research lies in the development of a more productive method for analyzing information on the position of the manipulator mechanism and forbidden zones on the basis of the obtained analytical dependencies.
Keywords: the space of generalized coordinates, area of allowed configurations, kinematic surfaces, virtual modeling, synthesis of robot movements, restricted areas, mechanism of the manipulator, vector of the speeds, parameters of a form forming, parameter of locations of forming
Введение
С развитием технологий автоматизации в промышленности массово распространяется практика использования автономных роботов для выполнения различных задач. Чтобы удовлетворить все более возрастающие требования, необходимо совершенствовать способы анализа окружающей среды роботом и модифицировать алгоритмы, отражающие работу и последовательность действий автономного робота при решении поставленных задач. В связи с этим в настоящее время интенсивно ведутся работы по созданию интеллектуальных роботов [1-4]. Предметом интеллектуального управления движением робота является определение его текущего, целевого и промежуточных положений механизма манипулятора в пространстве. Поэтому определение траектории движения робота с учетом окружающей внешней среды, это задача оптимизации выполнения операций по перемещению ВЗ из начального положения в целевое.
Одним из способов интеллектуального управления движением манипулятора в сложно организованной среде является способ, основанный на использовании алгоритма построения движения по вектору скоростей [5-7]. Построение движения механизма манипулятора этим способом может быть основано на анализе текущих ситуаций с исследованием совокупностей разрешенных и запрещенных конфигураций [8,9]. В работе [10] был предложен способ анализа взаимного положения механизма манипулятора и запретных зон, основанный на использовании области разрешенных конфигураций при виртуальном моделировании движений роботов. С этой целью указанная область задается аналитически, а полученный мат. аппарат используется для модификации траектории движения манипулятора в пространстве обобщенных координат. Область разрешенных конфигураций при этом выступает в качестве базы знаний, характеризующей прошлый опыт построения дискретных положений механизма манипулятора с учетом заранее известных запретных зон.
Таким образом, интеллектуальное управление («поведение») робота можно улучшить использованием базы знаний о конечном числе стандартных ситуаций. Эти ситуации определяют положением запретных зон, траекторий движения центра ВЗ, и др. Базы знаний представлены в виде зависимостей параметров, определяющих области разрешенных конфигураций в пространстве обобщенных координат и параметров, задающих ограничения на положения механизма манипулятора.
Постановка задачи исследования
На рисунке 1 изображена кинематическая схема механизма манипулятора мобильного робота «Варан» и положение запретных зон P1 и P2. Высота нижнего уровня проема для рассматриваемого примера в системе координат O1 принята равной zn = 500 мм, а высота самого проема может изменяться (для тестового задания данная высота определяется параметром zоp = 500 мм), минимальное безопасное удаление основания манипулятора от препятствия принято равным xор = 800 мм (см. рис. 1). Геометрические параметры, задающие механизм манипулятора представлены в работе [11]. Обобщенные координаты на рисунке обозначены qi. Для того чтобы оценить влияние положения запретной зоны Р1 на форму области разрешенных конфигураций, необходимо рассмотреть два случая расположения запретных зон.
В первом случае запретная зона пусть задана в виде горизонтальной плоскости уровня, а во втором - в виде нескольких фронтально проецирующих плоскостей, которые в совокупности на фронтальной проекции изображаются в виде четырёх угольника Р1 (см. рис. 1). Движения звеньев механизма будем исследовать в плоскости параллельной фронтальной плоскости проекций при q1 = 0.
Очевидно, что запретная зона, заданная горизонтальной плоскостью уровня Δ (см. рис. 1), создает в пространстве обобщенных координат Lq область разрешенных конфигураций Λ. Эту область Λ рационально задать с помощью использования нескольких кинематических поверхностей, образующими которой являются прямые или эллипсы li. Параметры формы образующих фрагментов эллипсов этих поверхностей, определяемые размерами большой и малой полуосей, изменяются в различных сечениях, при изменении обобщенной координатой q2.
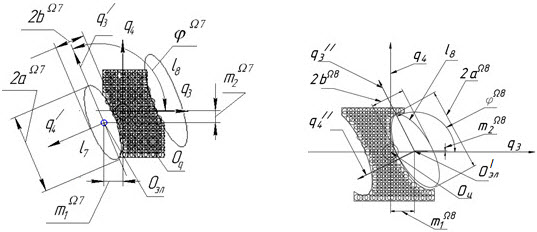
Обозначения параметров положения и формы эллипсов l7 и l8 являющихся фрагментами образующих кинематических поверхностей представлены на рисунке 2аб (для задания границ сечений используется восемь различных линий li [12]) .
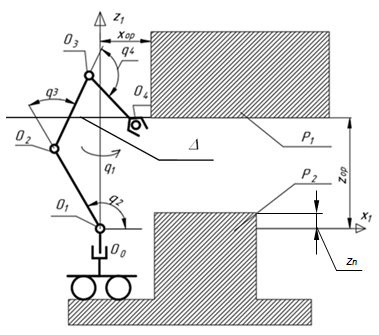
Рис.1. Кинематическая схема механизма манипулятора мобильного робота «Варан» и положение запретных зон
В настоящей работе предложен параметрический способ задания области разрешенных конфигураций L, который использован при создании базы знаний о прошлом опыте синтеза движений механизма манипулятора при различных произвольных значениях параметров zор и xор (см. рис. 1). Параметры zор и xор определяют при этом положение запретной зоны Р1.
Параметрический способ задания области разрешенных конфигураций
Условимся область запрещенных конфигураций, заданную фрагментами кинематических поверхностей с образующими l7 и l8, обозначать Ω7 и Ω8 (см. рис. 2аб). Методика задания области разрешенных конфигураций ранее была предложена в работах [10-12], где используются так же области Ω1 – Ω6. При этом область L получают на основе использования операций объединения и вычитания теории множеств, выполняемых с областями Ωi [13]. На рисунке 2аб представлены сечения области разрешенных конфигураций L соответственно при значении обобщенной координаты q2 равной сорока и двадцати градусов при этом zop = 1000мм. На данном рисунке изображены эллипсы l7 и l8 используемые для задания фрагментов наружного контура сечений области L.
а б
Рис. 2 – Определение параметров положения и формы эллипсов l7 и l8 фрагментов наружного контура сечения области L при наличии запретной зоны, заданной в виде горизонтальной плоскости уровня при zop = 1000мм : а – эллипс l7 при q2 = 40o ; б – эллипс l8 при q2 = 20o
Параметры  на рисунке 2аб определяют положение центров эллипсов l7 и l8, а параметры на рисунке 2аб определяют положение центров эллипсов l7 и l8, а параметры  задают значения большой и малой полуосей соответственно эллипсов l7 и l8. Значения указанных параметров вычисляют с помощью функций от значений обобщенной координаты q2. С этой целью используются полиномы третей степени. Зависимости указанных параметров формы задают значения большой и малой полуосей соответственно эллипсов l7 и l8. Значения указанных параметров вычисляют с помощью функций от значений обобщенной координаты q2. С этой целью используются полиномы третей степени. Зависимости указанных параметров формы  и положения и положения  эллипса l7 имеют следующий вид: эллипса l7 имеют следующий вид:
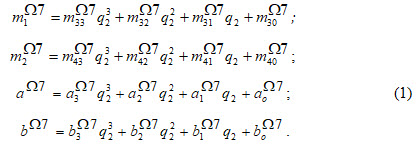
На основе использования уравнений (1) для эллипса l7 и аналогичных уравнений для эллипса l8 неравенства, определяющие точки принадлежащие областям Ω7 и Ω8 пространства Lq и задающие запрещенные конфигурации для этого случая имеют следующий вид:
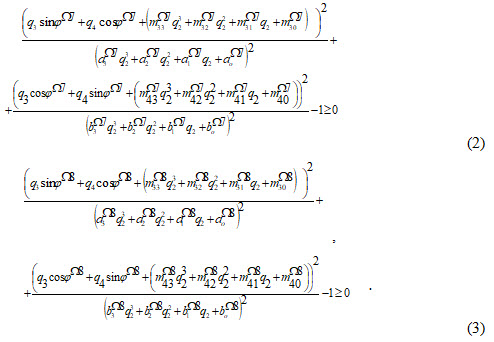
Неравенства (2-3) получают на основе использования преобразований координат при переходе от систем  и и  связанных с эллипсами к системе связанных с эллипсами к системе  задающей репер плоскости сечения в пространстве обобщенных координат Lq (см. рис. 2аб). Центры систем координат Оэл и О /эл совпадают с центрами эллипсов l7 и l8 . задающей репер плоскости сечения в пространстве обобщенных координат Lq (см. рис. 2аб). Центры систем координат Оэл и О /эл совпадают с центрами эллипсов l7 и l8 .
Для определения коэффициентов неравенства (2-3) для случая, когда запретная зона задана горизонтальной плоскостью уровня Δ зависимости коэффициентов  =f1(zоp), =f1(zоp),  = f2(zоp), …, = f2(zоp), …,  = f4(zоp), = f4(zоp),  = f9(zоp), = f9(zоp),  = f10(zоp), …, = f10(zоp), …,  =f13(zоp), =f13(zоp),  =f14(zоp), …. представим в виде интерполяционных полиномов третей степени. Для решения этой задачи используем полиномы, которые склеиваются в узловых точках. Пусть на отрезке =f14(zоp), …. представим в виде интерполяционных полиномов третей степени. Для решения этой задачи используем полиномы, которые склеиваются в узловых точках. Пусть на отрезке  заданы узлы заданы узлы  ,а также l+1 значений параметра ,а также l+1 значений параметра  , ,  , (определяющих коэффициент полинома задающего значение координаты , (определяющих коэффициент полинома задающего значение координаты  центра эллипса l7 (см. рис. 2а)) по направлению оси q3. Значения параметра , определяются экспериментальными исследованиями построенных сечений для различных положений запретной зоны Р1. Для решения указанной задачи используем полином третьей степени: центра эллипса l7 (см. рис. 2а)) по направлению оси q3. Значения параметра , определяются экспериментальными исследованиями построенных сечений для различных положений запретной зоны Р1. Для решения указанной задачи используем полином третьей степени:

На основе изложенной методики, возможно, определять значения для других коэффициентов неравенства (1). Коэффициенты неравенств (1-2) в этом случае в соответствии с описанным выше методом определяются следующими шестнадцатью зависимостями:
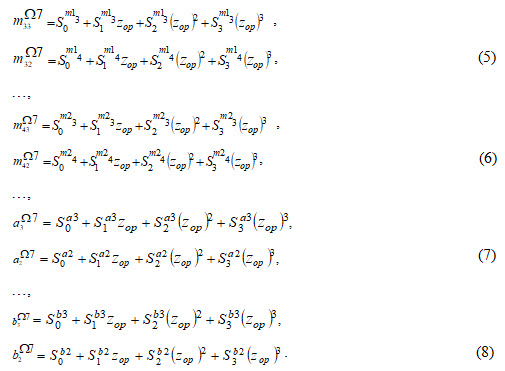
Расчетные значения коэффициентов полиномов определяют на основе задания совокупностей узловых точек, полученных в результате вычислительных экспериментов с различными значениями параметра zор. Полученные зависимости (4-7) позволяют для различных высот туннеля или значений параметра zoр рассчитывать значения коэффициентов полиномов используемых в неравенствах (1-2). Аналогичным образом значения коэффициентов неравенства (2) могут быть определены для нахождения положения центра эллипса l8 и параметров его формы (соотношения  =f1(zоp), =f1(zоp),  = f2(zоp), …, = f2(zоp), …,  = f4(zоp), = f4(zоp),  = f5(zоp), …, = f5(zоp), …,  = f6(zоp), … , = f6(zоp), … ,  =f13(zоp), =f13(zоp),  =f14(zоp), …. ) (см. рис. 2б). =f14(zоp), …. ) (см. рис. 2б).
На рисунке 3абв приведены результаты расчетов коэффициентов соотношений (4-7) и на основе этого графическое представление функций  = f15(q2, zoр), = f15(q2, zoр),  = f16(q2, zoр),и = f16(q2, zoр),и  = f17(q2, zoр) определяющих положение и форму эллипса l7 в различных сечениях. Всвязи с тем, что смещение центра эллипса по направлению оси q4 незначительное функция = f17(q2, zoр) определяющих положение и форму эллипса l7 в различных сечениях. Всвязи с тем, что смещение центра эллипса по направлению оси q4 незначительное функция  = f18(q2, zoр) имеет отображение на графике близкое к плоскости. Поэтому в данной работе график указанной функции не приводится. = f18(q2, zoр) имеет отображение на графике близкое к плоскости. Поэтому в данной работе график указанной функции не приводится.
Определим аналогичным образом положения центров эллипсов и значения длин большой и малой полуосей для случая, когда запретная зона ограничивается фронтально проецирующими плоскостями (образующими контур прямоугольника Р1 см. рис. 1) в зависимости от значений xop и zop. Результаты вычислительных экспириментов и расчета графиков функций = f19(q2, zoр), = f20(q2, zoр)и = f21(q2, zoр) для трех различных значений параметра xор представлены на рисунке 4абв.
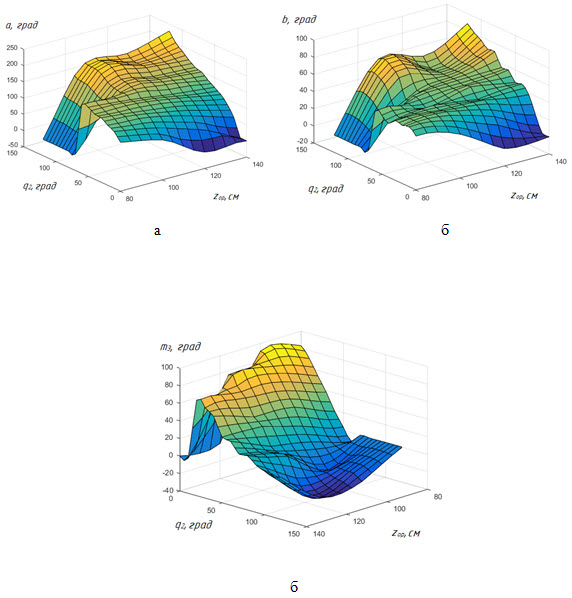
Рис. 3 – Изображение графиков-функций: а - = f15(q2, zoр);
б - = f16(q2, zoр); в - = f17(q2, zoр)
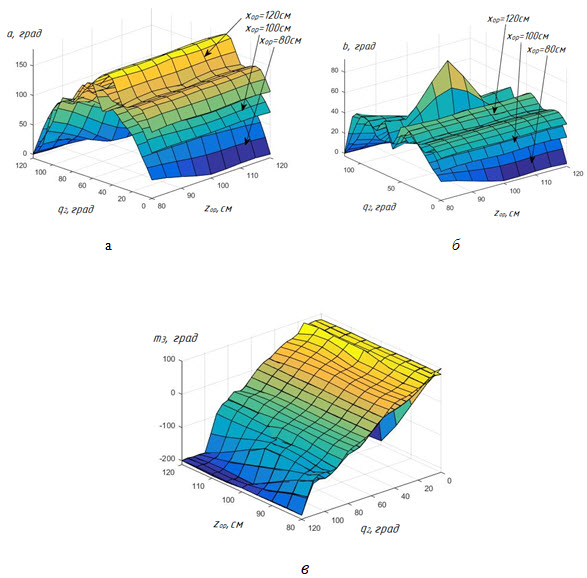
Рис. 4 - Графики-функции a – = f19 (q2, zор ); б – = f20 (q2, zор) :
в – = f21(q2, zор )
Анализ графиков, представленных на рисунках 3абв и 4абв показывает, закономерности изменения значений параметров, определяющих положение и форму фрагментов эллипсов используемых для задания границ сечений области разрешенных конфигураций Λ, от значений zор и xop, задающих положение запретной зоны Р1.
С целью определения закономерностей изменения значений , и в зависимости от положения запретной зоны, которое задано параметрами xop и zop, а так же от координаты q2, найдены значение данных параметров для различных точек пространства обобщенных координат.
Результаты расчётов для десяти различных точек с некоторым шагом представлены в таблице. Для моделирования гиперповерхностей в трех четырёхмерных пространствах, определяемых параметрами (xop, zop, q2, ) , (xop, zop, q2, ) и (xop, zop, q2, ) выбираем для первого пространства узловую точку Aa1 (xop, zop, q2, ) → A a1 (75см, 75см, 110°, 58°) (cм. табл.) [14]. Через данную точку проведём по три перпендикулярные 3-плоскости αj (j = 1, 2, 3) и αi (i = 1, 2, 3).
Таблица
Значения координат узловых точек интерполирования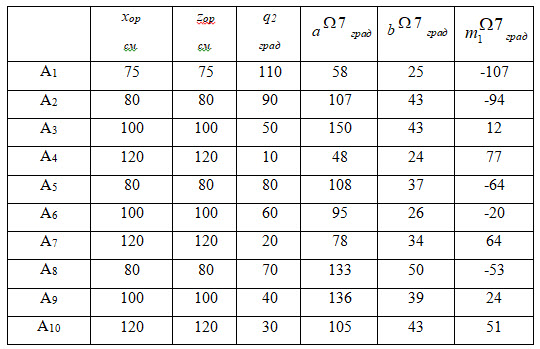
В каждой из 3-плоскостей αj моделируем интерполирующие кривые данных массивов точек, которые будут являться одномерными образующими моделируемой гиперповерхности. Уравнения трех гиперповерхностей в трех различных четырёх мерных пространствах будут следующие:
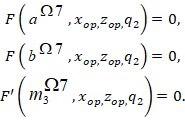 (9) (9)
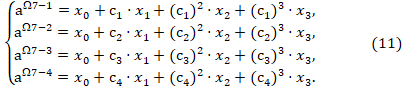
В качестве одномерных образующих пространства с координатами xop, zop, q2 и а7, выбираем интерполирующие полиномы третьего порядка. Для этого в каждой из плоскостей αi выбираем по четыре узла интерполирования 
Первые и вторые компаненты списка координат xop и zopточек A1/ и т.п. заданы в сантиметрах, а третья q2 и четвертая в градусах. Уравнения интерполирующих полиномов располагающих в трёх взаимно перпендикулярных плоскостях α1, α2 и α3 будут следующие:
 (10) (10)
Коэффициенты уравнений (10) вычисляют решением трёх систем состоящих из четырех уравнений с четырьмя неизвестными. Первое уравнение получают при подстановке в первое уранение системы (10) координат точек A1/, A2/, A3/ и A4/.
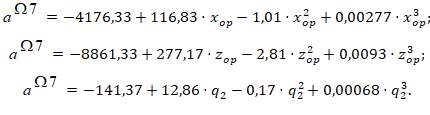
Решая данную систему (вместо ci подставляя поочередно координату xop точек A1/, A2/, A3/ и A4/), получаем коэффициенты x0, x1, x2 и x3 первого уравнения системы (10) для переменной а7. Подставляя поочередно координату zop точек A1//, A2//, A3// и A4//, получаем коэффициенты x0, x1, x2 и x3 второго уравнения (10). Анологичным образом определяются уравнения (10) для переменных b7 и m37. Для получения первого уравнения моделирующей гиперповерхности (9), необходимо суммировать уравнения (10) и сумму поделить на три [14]. Уравнения гиперповерхностей третьего порядка после этого принимают следующий вид:



(12)
Уравнения (12) позволяют в приближенном виде определять значения , и в зависимости от значения переменных xop, zop и q2. Относительная максимальная погрешность определения параметров , и в заданной области (см. табл.) на основе использования соотношений (12) составляет 10-15 процентов.
Моделирование движения манипулятора с использованием области разрешенных конфигураций
В работе по результатам теоретических исследований выполнено решение тестовой задачи связанной с перемещения центра ВЗ при наличии запретной зоны P1 (см. рис. 5абв). При этом использовался алгоритм виртуального моделирования движения механизма манипулятора на основе синтеза движений по вектору скоростей изложенный в работе [11]. Значения обобщенных координат определялись на основе использования параметрического способа задания области разрешенных конфигураций L. Моделирование движения выполнено в системе САПР ACAD с использованием алгоритмического языка программирования AutoLISP. На рисунке 5а представлены результаты моделирования движения механизма манипулятора при отсутствии запретных зон. Соответственно на рисунке 5бв показан синтез движений при наличии запретных зон с использованием разработанного алгоритма анализа текущих ситуаций. При моделировании движений представленных на рисунках 5б и 5в использовался масштаб отображения вектора Lqh, который был принят равным h = 1 и h = 2 [11]. По результатам синтеза движений определены графики функций q = f(t), отражающие изменение обобщенных координат qi (см. рис. 6аб). Где t определяет текущий параметр движения. Анализ графиков показывает, что использование масштаба отображения Lqh позволяет уменьшить кривизну траекторий, что позволяет так же уменьшить динамические нагрузки на исполнительный механизм.
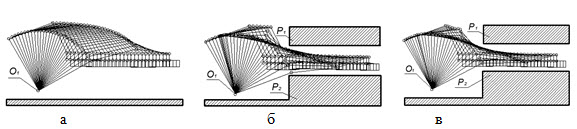
Рис. 5. Результаты синтеза движений манипулятора: а - синтез по критерию минимизации объема движения при отсутствии запретных зон, б - синтез при значении h =1; в - синтез при значении h =2
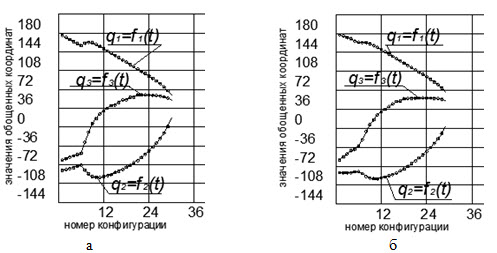
Рис. 6 Графики изменения обобщенных координат при синтезе движений манипулятора с анализом пересечения вектора Lqh и области L:
а - при значении h =1; б – при значении h =2
.
Заключение и выводы
Полученные зависимости позволяют построить область разрешенных конфигураций, являющейся базой знаний при интеллектуальном управлении движением механизма манипулятора в заранее известной внешней среде. Использование полученной области при синтезе траектории в конфигурационном пространстве Q позволяет проводить коррекцию движения манипулятора с целью предвидения и исключения тупиковых ситуаций при синтезе движений по вектору скоростей.
Использование разработанного алгоритма оценки текущих ситуаций, позволяет на виртуальном уровне синтезировать траекторию движения от начальной до целевой точки ВЗ. Время расчета тестового задания при использовании разработанного метода сокращается на порядок по сравнению со способом, при котором для каждой итерации определяется пересечение примитивов задающих звенья механизма манипулятора и запретных зон.
Библиография
1. Афонин, В. Л. Интеллектуальные робототехнические системы / В. Л. Афонин, В. А. Макушкин. – М. : Интернет-университет информационных технологий, 2010. – 208 с.
2. Григорьев, С. Н. Современное состояние и перспективы развития промышленной робототехники / С. Н. Григорьев, А. Г. Андреев, С. П. Ивановский // Мехатроника, автоматизация, управление. - 2013. - № 1. - С. 30-34.
3. Лохин, В. М. Повышение адаптивных свойств автономных роботов на базе интеллектуальных технологий / В. М. Лохин, С. В. Манько, М. П Романов. // Экстремальная робототехника. – 2015. – № 1 (1). – С. 59–67.
4. Юсупов, Р. М. Интеллектуализация процессов управления и навигации робототехнических систем / Р. М. Юсупов, А. В. Тимофеев // Экстремальная робототехника. – 2014. – Т. 1, № 1. – С. 16–21.
5. Whitney, D. E. The Mathematics of Coordinated Control of Prosthetic Arms and Manipulators / D. E. Whitney // J. Dyn. Sys., Meas., Control. – 2010. – № 94 (4). – P. 303–309.
6. Кобринский, А. А. Манипуляционные системы роботов / А. А. Кобринский, А. Е. Кобринский. – М. : Наука. 1985. – 343 c.
7. Корендясев, А. И. Манипуляционные системы роботов / А. И. Корендясев, Б. Л. Саламандра, Л. И. Тывес. – М. : Машиностроение, 1989. – 472 с.
8. Lopatin P. Investigation of a Target Reachability by a Manipulator in an Unknown Environment. International Conference on Mechatronics and Automation. 2016. August 7-10, Harbin, China.
9. Лопатин, П.К., Исследование достижимости целевых состояний в неизвестной статической среде / П.К. Лопатин // Мехатроника, автоматизация, управление. - 2009. - №4. - С. 2 - 6.
10. Притыкин, Ф. Н. Исследование поверхностей, задающих границы области разрешенных конфигураций механизма мобильного манипулятора при наличии запретных зон / Ф. Н. Притыкин, Д. И. Нефедов // Мехатроника, автоматизация, управление. – 2016. – № 6, – т. 17. – С. 404–413.
11. Притыкин, Ф. Н. Геометрический анализ текущих ситуаций, характеризующих положение манипулятора и окружающей среды на основе использования области разрешенных конфигураций [Электронный ресурс] / Ф. Н. Притыкин , В. Г. Хомченко, Д. И. Нефедов // Программные системы и вычислительные методы. – 2017. – № 2. – Режим доступа: http://e-notabene.ru/ppsvm/article_22685.html
12. Притыкин, Ф.Н. Исследование влияния запретных зон на форму и положение области разрешенных конфигураций механизма манипулятора / Ф.Н. Притыкин, Д.И. Нефедов // Омский научный вестник. - 2017. - Т. 1, № 1. - С. 19 - 24.
13. Рвачев, В. Л. Теория R-функций и некоторые ее приложения / В. Л. Рвачев. – Киев, 1982. – 252 с.
14. Вертинская, Н. Д. Задачи геометрического моделирования технологических процессов: научно–методическое пособие / Н. Д. Вертинская. – М. : Издательский дом Академии Естествознания, 2015. – 132 с.
References
1. Afonin, V. L. Intellektual'nye robototekhnicheskie sistemy / V. L. Afonin, V. A. Makushkin. – M. : Internet-universitet informatsionnykh tekhnologii, 2010. – 208 s.
2. Grigor'ev, S. N. Sovremennoe sostoyanie i perspektivy razvitiya promyshlennoi robototekhniki / S. N. Grigor'ev, A. G. Andreev, S. P. Ivanovskii // Mekhatronika, avtomatizatsiya, upravlenie. - 2013. - № 1. - S. 30-34.
3. Lokhin, V. M. Povyshenie adaptivnykh svoistv avtonomnykh robotov na baze intellektual'nykh tekhnologii / V. M. Lokhin, S. V. Man'ko, M. P Romanov. // Ekstremal'naya robototekhnika. – 2015. – № 1 (1). – S. 59–67.
4. Yusupov, R. M. Intellektualizatsiya protsessov upravleniya i navigatsii robototekhnicheskikh sistem / R. M. Yusupov, A. V. Timofeev // Ekstremal'naya robototekhnika. – 2014. – T. 1, № 1. – S. 16–21.
5. Whitney, D. E. The Mathematics of Coordinated Control of Prosthetic Arms and Manipulators / D. E. Whitney // J. Dyn. Sys., Meas., Control. – 2010. – № 94 (4). – P. 303–309.
6. Kobrinskii, A. A. Manipulyatsionnye sistemy robotov / A. A. Kobrinskii, A. E. Kobrinskii. – M. : Nauka. 1985. – 343 c.
7. Korendyasev, A. I. Manipulyatsionnye sistemy robotov / A. I. Korendyasev, B. L. Salamandra, L. I. Tyves. – M. : Mashinostroenie, 1989. – 472 s.
8. Lopatin P. Investigation of a Target Reachability by a Manipulator in an Unknown Environment. International Conference on Mechatronics and Automation. 2016. August 7-10, Harbin, China.
9. Lopatin, P.K., Issledovanie dostizhimosti tselevykh sostoyanii v neizvestnoi staticheskoi srede / P.K. Lopatin // Mekhatronika, avtomatizatsiya, upravlenie. - 2009. - №4. - S. 2 - 6.
10. Pritykin, F. N. Issledovanie poverkhnostei, zadayushchikh granitsy oblasti razreshennykh konfiguratsii mekhanizma mobil'nogo manipulyatora pri nalichii zapretnykh zon / F. N. Pritykin, D. I. Nefedov // Mekhatronika, avtomatizatsiya, upravlenie. – 2016. – № 6, – t. 17. – S. 404–413.
11. Pritykin, F. N. Geometricheskii analiz tekushchikh situatsii, kharakterizuyushchikh polozhenie manipulyatora i okruzhayushchei sredy na osnove ispol'zovaniya oblasti razreshennykh konfiguratsii [Elektronnyi resurs] / F. N. Pritykin , V. G. Khomchenko, D. I. Nefedov // Programmnye sistemy i vychislitel'nye metody. – 2017. – № 2. – Rezhim dostupa: http://e-notabene.ru/ppsvm/article_22685.html
12. Pritykin, F.N. Issledovanie vliyaniya zapretnykh zon na formu i polozhenie oblasti razreshennykh konfiguratsii mekhanizma manipulyatora / F.N. Pritykin, D.I. Nefedov // Omskii nauchnyi vestnik. - 2017. - T. 1, № 1. - S. 19 - 24.
13. Rvachev, V. L. Teoriya R-funktsii i nekotorye ee prilozheniya / V. L. Rvachev. – Kiev, 1982. – 252 s.
14. Vertinskaya, N. D. Zadachi geometricheskogo modelirovaniya tekhnologicheskikh protsessov: nauchno–metodicheskoe posobie / N. D. Vertinskaya. – M. : Izdatel'skii dom Akademii Estestvoznaniya, 2015. – 132 s.
|
 Рус
Рус









