|
DOI: 10.7256/2409-7543.2017.1.21643
Дата направления статьи в редакцию:
08-01-2017
Дата публикации:
22-02-2017
Аннотация:
В статье рассматриваются проблемные вопросы распознавания тактических ситуаций в условиях автономного применения робототехнических комплексов военного назначения. По мнению большинства отечественных и зарубежных экспертов именно оснащение войск автономными робототехническими комплексами со средствами разведки и поражения способно привести к существенному повышению эффективности ведения боевых действий, в особенности к уменьшению собственных потерь в живой силе. Отсутствие эффективного решения задачи распознавания тактических ситуаций в сложно формализуемых условиях окружающей обстановки является одним из основных сдерживающих факторов создания автономных боевых систем. Предлагается для решения указанной задачи использовать логико-лингвистические методы и их нейросетевые реализации, в частности многослойный персептрон. Результаты моделирования показывают, что использование нейросетевой реализации логико-лингвистических методов распознавания на базе многослойного персептрона, позволяет реализовать данные методы в составе бортового машинного интеллекта робототехнического комплекса военного назначения для распознавания тактических ситуаций. Использование многослойного персептрона позволяет существенно ускорить процесс учета новых знаний, так как для построения новой системы распознавания тактических ситуаций, необходимо только скорректировать обучающую выборку и переобучить многослойный персептрон, что занимает значительно меньше времени, чем построение группой экспертов новой группы логических правил.
Ключевые слова:
распознавание образов, робототехнический комплекс, беспилотный летательный аппарат, автономность, тактическая ситуация, логико-лингвистические методы, нечеткая модель, лингвистическая переменная, искусственная нейронная сеть, многослойный персептрон
УДК: 004.8/93
Abstract: The paper considers the problems of tactical situations recognition in the context of autonomous use of military robotic systems. In the opinion of most Russian and foreign experts, arming of troops with autonomous military robotic systems, equipped with reconnaissance assets and weapons, can significantly increase the effectiveness of conduct of operations and reduce depletion of ranks. The absence of an effective mechanism of tactical situations recognition in the context of the environment that is hard to formalize is one of the key deterrents to the creation of autonomous military systems. The authors suggest applying logical and linguistic methods and their neural network realizations, particularly, the multilayer perceptron, to solve the mentioned task. The modeling results demonstrate that the use of neural network realization of logical and linguistic methods of recognition, based on the multilayer perceptron, allows using such methods in the on-board computer intelligence of a military robotic system for the recognition of tactical situations. The use of the multilayer perceptron helps significantly speed up the process of the new knowledge processing, since in order to create the new system of tactical situations recognition it is necessary to merely correct the learning sample and retrain the multilayer perceptron; it takes less time than the formation of a new logical samples group by a group of experts.
Keywords: pattern recognition, robotic system, unmanned aerial vehicle, autonomy, tactical situation, logical-linguistic methods, fuzzy model, linguistic variable, artificial neural network, multilayer perceptron
Введение
Военное руководство большинства развитых стран рассматривает использование робототехнических комплексов (РТК) как одно из важнейших направлений в развитии вооружения и военной техники [1, 2, 3]. Предполагается, что высокий уровень оснащения вооруженных сил США и стран НАТО робототехническими комплексами позволит обеспечить ведение полномасштабных сетецентрических боевых действий на основе группового применения безэкипажных платформ воздушного, морского и наземного базирования, что обеспечит высокую эффективность при минимальных потерях в живой силе.
Робототехнические комплексы уже не раз применялись в реальных боевых действиях ведущими мировыми державами, в первую очередь США. Так по оценкам экспертов [4], в январе 2013 г. коалиционными силами в Афганистане ежедневно использовалось порядка 12 000 образцов безэкипажных комплексов (Unmanned Ground Vehicles, UGV) различного назначения.
Планами Министерства обороны США к 2034 году предусматривается разработка и принятие на вооружение 171 типа наземных безэкипажных средств, 93 типа беспилотных летательных аппаратов (БЛА) и 47 типов безэкипажных надводных и подводных средств [5]. Результаты имитационного моделирования показали, что даже внедрение переносных, малоразмерных, наземных робототехнических комплексов с низким уровнем автономности (дистанционно управляемых) позволит с 36% до 73% повысить эффективность наступательных боевых действий в городских условиях, уменьшить боевые потери своей живой силы на 57% и увеличить на 50% количество летально пораженных солдат противника [6]. Соответственно, оснащение войск автономными робототехническими комплексами со средствами разведки и поражения способно привести к существенному повышению эффективности ведения боевых действий, в особенности к уменьшению собственных потерь в живой силе.
Автономность РТК является одной из его важнейших характеристик. Она характеризуется способностью комплекса выполнять функциональные задачи в течении заданного интервала времени без непосредственных управляющих воздействий и дополнительных внешних ресурсов [7]. Только обеспечив высокую автономность (до нескольких суток) возможно обеспечить полноценное групповое применение РТК. Очевидно, что автономность РТК тесно связано с его адаптивностью, то есть способностью приспосабливаться к изменяющимся условиям функционирования. В зависимости от сложившейся тактической ситуации (вида, формы и способа тактических действий противника) РТК должен самостоятельно выбрать способ, позволяющий наиболее эффективно решить целевую задачу. При неверной оценке ситуации, РТК может потратить свои ресурсы на решение второстепенных задач и не обеспечить решение целевой задачи на заданном интервале времени. Поэтому задача распознавания тактической ситуации (ТС), предшествующая принятию решения, является одной из важных задач.
1. Логико-лингвистический подход к решению задачи распознавания
С математической точки зрения задачу распознавания тактической ситуации можно отнести к задачам распознавания образов. Под распознаванием образов будем понимать совокупность методов и средств, позволяющих, по меньшей мере, достигнуть, а если возможно, то и превзойти естественные средства восприятия и анализа окружающего мира живыми существами [8]. Существует большое количество методов распознавания образов, но все они сводятся к задаче преобразования входной информации, в качестве которой целесообразно рассматривать некоторые параметры, признаки распознаваемых образов, в выходную, представляющую собой заключение о том, к какому классу относится распознаваемый образ. Алгоритм построения практически любой системы распознавания можно представить следующим образом [9, 10]:
- имеется некоторая совокупность объектов или явлений;
- производится выбор принципа классификации и в соответствии с выбранным принципом совокупность объектов подразделяется на ряд классов, т. е. составляется алфавит классов;
- разрабатывается словарь признаков, на языке которого описывается каждый класс объектов;
- создаются технические средства, обеспечивающие определение признаков, а на вычислительных средствах системы распознавания реализуется алгоритм распознавания, позволяющий сопоставлять апостериорные данные о неизвестном объекте с априорной информацией и на основе сопоставления определять, к какому классу он может быть отнесен;
- при появлении объекта, подлежащего распознаванию, с помощью технических средств наблюдения проводятся опыты и определяются его признаки;
- данные о признаках неизвестного объекта поступают на вход алгоритма распознавания, который, используя априорные описания классов, определяет, к какому классу может быть отнесен этот объект.
Применительно к распознаванию тактической ситуации, задача состоит в выработке решений, устанавливающих степень принадлежности  , к одному из заранее выделенных классов тактических ситуаций , к одному из заранее выделенных классов тактических ситуаций  . Получение указанного решения связано с выполнением ряда преобразований имеющихся сведений . Получение указанного решения связано с выполнением ряда преобразований имеющихся сведений  об объекте распознавания об объекте распознавания  с помощью специальных процедур, составляющих алгоритм распознавания с помощью специальных процедур, составляющих алгоритм распознавания  , базирующийся на некотором методе (или совокупности методов) распознавания. , базирующийся на некотором методе (или совокупности методов) распознавания.
Одним из наиболее сложных и важных этапов построения системы распознавания является составление алфавита классов распознаваемых объектов и словаря признаков [9]. Данный этап является эвристическим и не имеет строгой формальной процедуры.
Особенностью тактической ситуации на поле боя как объекта распознавания является то, что её нельзя описать исключительно численными параметрами (характеристиками). При описании тактической ситуации используются такие понятия как «средняя высота», «сложный рельеф», «интенсивный огонь» и т.д. То есть, используются качественные показатели, характеризующиеся некоторой степенью неопределенностью, хотя человек, использую такие показатели, уверенно решает поставленную задачу.
Таким образом, для решения задачи распознавания тактических ситуаций при применении робототехнических комплексов военного назначения, необходимо разработать формализованный аппарат построения распознающих систем, приближающихся по своим функциональным возможностям к возможностям человека в решении задач распознавания в условиях неопределенности, а по некоторым показателям – объему, времени обработки информации, нечувствительности к эмоциональным воздействиям и др., превосходящих его. Анализ существующих подходов к решению этой задачи показывает, что одним из перспективных средств для ее достижения является аппарат логико-лингвистического моделирования, позволяющий учитывать эвристики не только на подготовительном этапе, но и непосредственно в самой процедуре распознавания [11, 12]. Данное обстоятельство позволяет эффективно реализовать этот аппарат в робототехнических комплексах, обладающих элементами искусственного интеллекта.
Одним из преимуществ логико-лингвистического подхода является возможность формализации параметрической неопределенности признаков распознавания в форме лингвистических переменных (ЛП) [13]:
 , (1) , (1)
где  – наименование признака, описывающее некоторое свойство объекта распознавания, например скорость, количество целей, характер маневрирования и т.д., ( – наименование признака, описывающее некоторое свойство объекта распознавания, например скорость, количество целей, характер маневрирования и т.д., ( ); );  – множество значений (терм-множество) признака , представленное набором нечетких переменных в форме слов, описывающих качественные характеристики значений лингвистической переменной, например: «средняя», «большая», «малая» и т.д.; – множество значений (терм-множество) признака , представленное набором нечетких переменных в форме слов, описывающих качественные характеристики значений лингвистической переменной, например: «средняя», «большая», «малая» и т.д.;  – множество числовых значений, соответствующих нечетким переменным, которым свойственна количественная характеристика, например, лингвистической переменной «скорость», имеющей в качестве своего значения нечеткую переменную «средняя» ставится в соответствие интервал значений от 30 до 60 км/ч; – множество числовых значений, соответствующих нечетким переменным, которым свойственна количественная характеристика, например, лингвистической переменной «скорость», имеющей в качестве своего значения нечеткую переменную «средняя» ставится в соответствие интервал значений от 30 до 60 км/ч;  – идентификационный номер лингвистической переменной. – идентификационный номер лингвистической переменной.
Именно возможность использования лингвистических переменных является ключевым моментом для выбора логико-лингвистического подхода для распознавания тактических ситуаций. Современные робототехнические комплексы специального назначения представляют собой, как правило, дистанционно управляемые машины, где функцию оператора выполняет человек. Именно на человека возлагаются функции принятия ключевых решений, например подтверждение применения РТК оружия по выбранной цели. Даже в случае создания автономных РТК, для выполнения ряда наиболее важных решений будет необходимо подтверждение этой операции человеком. В связи с этим очень важно, чтобы взаимодействие РТК и человека осуществлялось на понятном человеке языке.
Нечеткие переменные , входящие в состав (1), представляют собой значения лингвистической переменной и описываются кортежами:
 , ,
где  – название нечеткой переменной («большой», «средний» и т.д.), – название нечеткой переменной («большой», «средний» и т.д.),  ; ;  - область определения числовых значений переменной; - область определения числовых значений переменной;  – нечеткое множество, характеризующее количественную оценку (меру) степени соответствия между элементами множеств и ; – нечеткое множество, характеризующее количественную оценку (меру) степени соответствия между элементами множеств и ;  – идентификационный номер нечеткой переменной, – идентификационный номер нечеткой переменной,  . .
Множество описывается набором пар следующего вида:
  , ,  , ,
где  – функция принадлежности, отражающая меру того, насколько числовое значение некоторого свойства – функция принадлежности, отражающая меру того, насколько числовое значение некоторого свойства  соответствует вербальному значению, смысл которого формируется нечеткой переменной . Также, нечеткие множества могут задаваться непосредственно в виде функций принадлежности: соответствует вербальному значению, смысл которого формируется нечеткой переменной . Также, нечеткие множества могут задаваться непосредственно в виде функций принадлежности:
 . .
Количественные оценки степени соответствия между элементами множеств и определяются, как правило, по результатам экспертного опроса.
Применительно к решению задачи распознавания ТС, построение функций принадлежности целесообразно проводить прямым методом, на основе экспертного опроса группы опытных командиров, имеющих практические навыки оценки ТС в реальных условиях боя. Данную процедуру целесообразно проводить в следующей последовательности действий [13]:
1. Формируется коллектив экспертов примерно одинакового и одновременно достаточно высокого уровня квалификации.
2. В ходе экспертного опроса формируется множество вербальных значений  заранее выделенных признаков заранее выделенных признаков  , используемых при распознавании ТС. , используемых при распознавании ТС.
3. Осуществляется сопоставление числовых значений признаков с их вербальными значениями . Например, предлагается установить соответствие между значением скорости движения цели 10 м/с и значением «средняя скорость» путем положительного или отрицательного ответа. Индифферентные соответствия не допускаются. Значение функции принадлежности определятся по формуле:
 , (2) , (2)
где  – количество экспертов, положительно оценивших соответствие между и ; – количество экспертов, положительно оценивших соответствие между и ;  - общее количество экспертов, участвующих в опросе. - общее количество экспертов, участвующих в опросе.
4. Проводится нормирование полученных значений функций принадлежности в соответствии с выражением:
 , . , .
5. Полученные ФП аппроксимируются кривыми в виде симметричной «пилы» и по полученным результатам формируется модель объекта распознавания в виде описания, представленного нечеткими множествами второго уровня [13]:
 , ,  , ,
где  , , , , , ,  – функция принадлежности признака . – функция принадлежности признака .
Исходя из того, что модель объекта распознавания имеет нечеткое представление, то целесообразно в логико-лингвистической модели распознавания реализовать механизм выработки нечетких решений.
В традиционной (двоичной) логике решения об истинности одних суждений выводятся на основании истинности других суждений. Обычно, подобный вывод задается в виде логической схемы: над горизонтальной чертой записываются все условия, на основании которых принимается решение, а под чертой - полученный результат. Смысл такой схемы в следующем, если истинно суждение над чертой, то истинно суждение и под чертой. В [13] для распознавания ТС предлагается использовать правило «modus ponens»:
 . (3) . (3)
Выражение (3) показывает, что если имеют место факты  , и из совокупности этих факторов , и из совокупности этих факторов  следует факт следует факт  , то факт считается истинным. Под совокупностью фактов понимается лингвистическое описание объекта распознавания, а под фактом – решение о принадлежности объекта к одному из заранее выделенных классов , то факт считается истинным. Под совокупностью фактов понимается лингвистическое описание объекта распознавания, а под фактом – решение о принадлежности объекта к одному из заранее выделенных классов  . Данные конструкции целесообразно представлять в виде правил «если А, то B», или в символах программирования «IF A THEN B», например: . Данные конструкции целесообразно представлять в виде правил «если А, то B», или в символах программирования «IF A THEN B», например:
 . (4) . (4)
В рассматриваемом случае, следствие  о выводимости факта из совокупности факторов нельзя считать достоверным, поскольку оно базируется на сведениях эмпирического характера. Для описания уверенности качества такого решения целесообразно использовать лексические единицы (модификаторы) [13]: «редко», «никогда», «часто» и т.п. о выводимости факта из совокупности факторов нельзя считать достоверным, поскольку оно базируется на сведениях эмпирического характера. Для описания уверенности качества такого решения целесообразно использовать лексические единицы (модификаторы) [13]: «редко», «никогда», «часто» и т.п.
Для задания лингвистического описания уверенности в правильности решения и классе ТС могут использоваться лингвистические и соответствующие им числовые оценки, представленные в таблице 1.
Таблица 1. Соответствие лингвистических оценок числовым
|
Лингвистическая оценка
|
«никогда»
|
«редко»
|
«иногда»
|
«в среднем»
|
«часто»
|
«почти всегда»
|
«всегда»
|
|
Числовая оценка
|
0
|
0,1…0,2
|
0,3…0,4
|
0,5
|
0,6…0,7
|
0,8…0,9
|
1
|
В [13] предложена схема квазиаксиоматического нечеткого вывода, основанная на формализации эвристики дедуктивного типа, позволяющая имитировать логику рассуждений на нечетких сведениях при распознавании тактических ситуаций:
 , (5) , (5)
где  – параметрическая неопределенность, характеризующая неточность описания объекта распознавания, задаваемая заранее при формировании классов опорных объектов распознавания; – параметрическая неопределенность, характеризующая неточность описания объекта распознавания, задаваемая заранее при формировании классов опорных объектов распознавания;  – процедурная неопределенность, отражающая неточность заключения о принадлежности распознаваемого объекта к заранее выделенным классам, в соответствии с таблицей 1; – процедурная неопределенность, отражающая неточность заключения о принадлежности распознаваемого объекта к заранее выделенным классам, в соответствии с таблицей 1;  - результирующая неопределенность решения о классе распознаваемого объекта. - результирующая неопределенность решения о классе распознаваемого объекта.
Несмотря на достоинства схем (моделей) нечеткого вывода, в первую очередь, заключающихся в описании объекта распознавания на языке, близком к естественному, нечетким моделям присущи и недостатки [14]:
- набор исходных нечетких правил (4) формируется группой экспертов и может оказаться не полным или противоречивым;
- субъективность в выборе вида и параметров функции принадлежности;
- не реализован процесс самообучения (автоматического приобретения знаний);
- большой набор логико-лингвистических правил сложно реализовать в виде машинного интеллекта из-за требуемых больших вычислительных мощностей.
Одним из путей компенсации последнего недостатка является использование полносвязных искусственных нейронных сетей (ИНС) типа персептрон [15, 16].
2. Распознавание тактических ситуаций с использованием нейронных сетей
Первый этап построения нейронной сети для распознавания тактической ситуации заключается, также как и в логико-лингвистическом методе, в опросе группы экспертов. Целью этапа является формирование нечеткой обучающей выборки. На втором этапе, с использованием обучающей выборки, производится обучение ИНС. После проведения процедуры обучения, ИНС готова к работе. Для распознавания ТС на вход персептрона подается вектор числовых признаков ТС, на выходе ИНС формируются значения ФП для каждого класса распознаваемых тактических ситуаций. Полученные значения ФП используются машинным интеллектом для принятия решения о классе ТС.
Формирование нечеткой обучающей выборки производится экспертным методом. Каждому эксперту предлагается провести классификацию тактической ситуации по результатам анализа вектора числовых признаков  , где , , где ,  – количество признаков распознавания, – количество признаков распознавания,  , ,  – количество примеров в выборке. То есть, сформировать соответствие – количество примеров в выборке. То есть, сформировать соответствие  , ,  . Примеры . Примеры  формируются исходя из существующих практических наблюдений (измерений) тактических действий противника, или путем случайного комбинирования числовых значений признаков формируются исходя из существующих практических наблюдений (измерений) тактических действий противника, или путем случайного комбинирования числовых значений признаков  , в рамках возможных допустимых диапазонов значений, с заданной плотностью их покрытия образцами (примерами обучающей выборки). , в рамках возможных допустимых диапазонов значений, с заданной плотностью их покрытия образцами (примерами обучающей выборки).
Далее производится формирование ФП каждого примера классу тактической ситуации ,  аналогично (2): аналогично (2):
 , ,
где  – количество экспертов, положительно оценивших соответствие между и ; – количество экспертов, положительно оценивших соответствие между и ;  - общее количество экспертов, участвующих в опросе. В итоге, по результатам опроса, имеется обучающая выборка, состоящая из множества примеров следующего вида: - общее количество экспертов, участвующих в опросе. В итоге, по результатам опроса, имеется обучающая выборка, состоящая из множества примеров следующего вида:
 , , . , , .
Для удобства формирования и обучения персептрона, полученные ФП нормируются и приводятся к условиям:
 =1, =1,  . .
Алгоритм обучения персептрона можно представить последовательностью следующих этапов [16, 17]:
1. Начальная инициализация весовых коэффициентов и задание допустимой ошибки обучения e.
2. Предъявление векторов  на вход и получение текущих значений выхода персептрона на вход и получение текущих значений выхода персептрона  . .
3. Сравнение текущих и желаемых значений выхода.
4. Коррекция весов в соответствии с выбранным методом обучения.
5. По достижению минимума ошибки обучения для всех обучение останавливается.
В рассматриваемом случае, количество нейронов входного слоя определяется количеством признаков распознавания ТС, количество нейронов выходного слоя равно количеству распознаваемых классов ТС. Анализ результатов применения искусственных нейронных сетей для решения задач распознавания показывает, что наиболее эффективными структурами являются трехслойный персептрон [17, 18], поэтому целесообразно для распознавания ТС выбрать именно эту структуру.
Проведем оценку применимости многослойного персептрона для распознавания ТС. Для этого рассмотрим гипотетическую ситуацию. Группа истребительных беспилотных летательных аппаратов (БЛА-И) направлена на перехват групповой воздушной цели противника. Самолеты противника движутся несколькими группами в одном направлении с незначительным разносом по высотам и дистанции. Задачей БЛА-И является уничтожение бомбардировщиков противника. Для выполнения поставленной задачи, БЛА-И должны определить в какой из групп самолетов противника находятся бомбардировщики. Для сбора информации БЛА-И используют бортовые РЛС. Для решения этой задачи синтезируем систему различения группы бомбардировщиков от группы истребителей. Будем считать, что эффективная площадь рассеяния (ЭПР) бомбардировщиков и истребителей в радиолокационном диапазоне являются близкими (применяются маскирующие средства). Поэтому, в качестве признаков распознавания будем использовать:
- количество ЛА в группе;
- дистанция между ЛА в группе;
- скорость ЛА.
В качестве системы распознавания будем использовать трехслойных персептрон с количеством нейронов в слоях: входной слой – 3 нейрона; скрытый слой – 5 нейронов; выходной слой – 2 нейрона (см. рисунок 2). Количество нейронов скрытого слоя  выбрано исходя из эвристического правила: выбрано исходя из эвристического правила:  , где , где  – количество распознаваемых классов ТС [17]. Функция активации нейронов – сигмоида, для обучения персептрона используется алгоритм Ридмиллера-Брауна [17]. Объем обучающей выборки - 100 примеров. Выборка формировалась по результатам опроса 10 экспертов. В таблице 2 приведен пример нескольких элементов обучающей выборки (в таблице: – количество распознаваемых классов ТС [17]. Функция активации нейронов – сигмоида, для обучения персептрона используется алгоритм Ридмиллера-Брауна [17]. Объем обучающей выборки - 100 примеров. Выборка формировалась по результатам опроса 10 экспертов. В таблице 2 приведен пример нескольких элементов обучающей выборки (в таблице:  – значение ФП примера в классе «истребители», а – значение ФП примера в классе «истребители», а  – значение ФП примера в классе «бомбардировщики»). – значение ФП примера в классе «бомбардировщики»).
Таблица 2. Примеры элементов обучающей выборки
|
№ примера
|
Кол-во ЛА
|
Дистанция в группе, м
|
Скорость ЛА, км/ч
|
|
|
|
1
|
2
|
301
|
2000
|
0,85
|
0,15
|
|
2
|
2
|
560
|
2077
|
0,92
|
0,18
|
|
3
|
4
|
387
|
1956
|
0,78
|
0,22
|
|
4
|
6
|
25
|
1322
|
0,10
|
0,90
|
|
5
|
6
|
201
|
1643
|
0,20
|
0,80
|
|
6
|
6
|
254
|
1702
|
0,34
|
0,66
|
|
7
|
6
|
292
|
1890
|
0,48
|
0,52
|
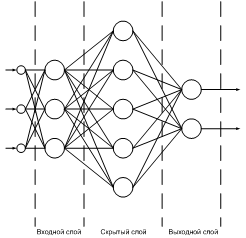
Рисунок 2 – Структурная схема трехслойного персептрона
Построение и обучение ИНС производилось в среде Matlab. Персептрон обучался до заданной точности (10-3) в среднем за 10 циклов (рисунок 3). Обученная ИНС, все контрольные примеры (не использованные при обучении), распознала правильно, на выходе персептрона были получены соответствующие значения функций принадлежности примеров к классам ТС.
К недостаткам использования ИНС для построения систем нечеткого вывода можно отнести то, что в результате обучения не формируются логические правила в явном виде, а имеется некий «черный ящик». В тоже время, нейронная сеть позволяет распространять полученные знание на области, данные из которых не использовались при обучении [17, 18], и, благодаря своей структуре, может быть достаточно легко реализована в цифровых процессорах, поддерживающих параллельные вычисления.
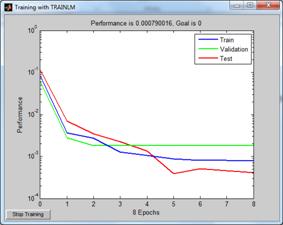 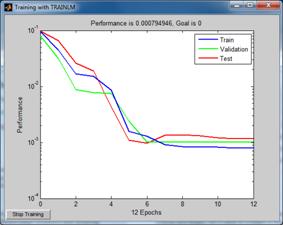
Рисунок 3 – Результаты обучения многослойного персептрона
Заключение
Решение задач распознавания тактических ситуаций робототехническими комплексами военного назначения при действиях в автономных условиях требует применение распознающих систем, имитирующих процесс принятия решения человеком. В условиях сложности формализации данного процесса, реализация системы распознавания тактических ситуаций РТК ВН должна базироваться на математическом аппарате нечеткой логики. Анализ существующих подходов к распознаванию нечетких объектов показывает, что для решения задачи распознавания ТС могут быть успешно использованы логико-лингвистические и нейросетевые алгоритмы. Результаты моделирования показали, что применение многослойных персептронов для распознавания тактических ситуаций не требует больших вычислительных мощностей, и такие распознающие системы могут быть реализованы в составе ботового оборудования РТК ВН. Использование многослойного персептрона позволяет существенно ускорить процесс учета новых знаний, так как для построения новой системы распознавания ТС, необходимо только скорректировать обучающую выборку и переобучить ИНС, что занимает значительно меньше времени, чем построение группой экспертов новой группы правил вида (5).
Библиография
1. Каляев И.А., Рубцов И.В. Боевым роботам нужна программа // Национальная оборона. 2012. № 8(77). C. 34-48.
2. Сердюк П., Слюсар В. Средства связи с наземными роботизированными системами. Современное состояние и перспективы // Электроника. Наука, технология, бизнес. 2014. № 7(00139). С. 66-74.
3. Хрипунов С.П., Благодарящев И.В., Чиров Д.С. Военная робототехника: современные тренды и векторы развития // Тренды и управление. 2015. № 4. С. 410-422.
4. Singer P.W., Wright T. New Rules of War. Big Bets and Black Swans. A Presidential Briefing Book // Policy Recommendations for President Obamas Second Term by the Foreign Policy Scholars at Brookings. January 2013. РP. 41-44.
5. Clapper J.R., Young J.J., Cartwright J.E. et al. Unmanned Systems Integrated Roadmap FY2009-2034 // Washington. DC: U.S. Department of Defense. April 6. 2007.
6. Bedel B. Small Ground Robot’s Effectiveness and Acquisition Strategy // Civilian Research Project. U.S. Army War College. 15 Jun. 2010.
7. Лапшов В.С., Носков В.П., Рубцов И.В., Рудианов Н.А., Гурджи А.И., Рябов А.В., Хрущев В.С. Перспективы разработки автономных наземных робототехнических комплексов специального военного назначения // Известия ЮФУ. Технические науки. 2016. № 1(174). С. 156-168.
8. Фор А. Восприятие и распознавание образов / Пер. с фр. А.В. Серединского; под ред. Г.П. Катыса. М.: Машиностроение. 1989. 282 с.
9. Горелик А.Л., Скрипкин В.А. Методы распознавания: Уч. пособие. 2-е изд., перераб. и доп. М.: Высш. шк., 1984. 208 с.
10. Аджемов С.С., Терешонок М.В., Кленов Н.В., Чиров Д.С. Методы распознавания видов цифровой модуляции сигналов в когнитивных радиосистемах // Вестник Московского ун-та. Сер. 3. Физика и Астрономия. 2015. № 6. С. 19-27.
11. Хрипунов С.П. Методы аналитико-эвристического прогнозирования поведения противника в групповом воздушном бою // Информационно-измерительные и управляющие системы. 2008. Т. 6. № 7. С. 61-72.
12. Хрипунов С.П., Демин А.Н. Бортовая интеллектуальная система прогнозирования поведения противника в групповом воздушном бою в условиях априорной неопределенности // Нелинейный мир. 2014. Т. 12. № 9. С. 38-44.
13. Хрипунов С.П. Распознавание тактических ситуаций в воздушном бою с использованием методов искусственного интеллекта // Информационно-измерительные и управляющие системы. 2009. Т. 7. № 4. C. 26-35.
14. Борисов В.В., Круглов В.В., Федулов А.С. Нечеткие модели и сети. М.: Горячая линия-Телеком, 2007. 284 с.
15. Аджемов С.С., Кленов Н.В., Терешонок М.В., Чиров Д.С. Использование искусственных нейронных сетей для классификации источников сигналов в системах когнитивного радио // Программирование. 2016. № 3. С. 3-11.
16. Хайкин С. Нейронные сети: полный курс. М.: Издательский дом «Вильямс», 2006. 1104 с.
17. Аджемов С.С., Виноградов А.Н., Лебедев А.Н., Макаренков С.А., Терешонок М.В., Чиров Д.С. Методы интеллектуального анализа слабоструктурированных данных и управления комплексами мониторинга. М.: Инсвязьиздат, 2009. 210 с.
18. Лучин А.А., Труфанов Е.Ю., Чиров Д.С. Оптимизация нейросетевых автоматов при классификации рассеивающих объектов по измерениям двумерных изображений // Нейрокомпьютеры: разработка, применение. 2006. № 3. С. 32-39.
19. Гарбук С.В. Перспективы применения интеллектуальных технологий для решения задач безопасности // Национальная безопасность / nota bene. 2016. № 4. C. 451 - 457. DOI: 10.7256/2073-8560.2016.4.19207.
References
1. Kalyaev I.A., Rubtsov I.V. Boevym robotam nuzhna programma // Natsional'naya oborona. 2012. № 8(77). C. 34-48.
2. Serdyuk P., Slyusar V. Sredstva svyazi s nazemnymi robotizirovannymi sistemami. Sovremennoe sostoyanie i perspektivy // Elektronika. Nauka, tekhnologiya, biznes. 2014. № 7(00139). S. 66-74.
3. Khripunov S.P., Blagodaryashchev I.V., Chirov D.S. Voennaya robototekhnika: sovremennye trendy i vektory razvitiya // Trendy i upravlenie. 2015. № 4. S. 410-422.
4. Singer P.W., Wright T. New Rules of War. Big Bets and Black Swans. A Presidential Briefing Book // Policy Recommendations for President Obamas Second Term by the Foreign Policy Scholars at Brookings. January 2013. RP. 41-44.
5. Clapper J.R., Young J.J., Cartwright J.E. et al. Unmanned Systems Integrated Roadmap FY2009-2034 // Washington. DC: U.S. Department of Defense. April 6. 2007.
6. Bedel B. Small Ground Robot’s Effectiveness and Acquisition Strategy // Civilian Research Project. U.S. Army War College. 15 Jun. 2010.
7. Lapshov V.S., Noskov V.P., Rubtsov I.V., Rudianov N.A., Gurdzhi A.I., Ryabov A.V., Khrushchev V.S. Perspektivy razrabotki avtonomnykh nazemnykh robototekhnicheskikh kompleksov spetsial'nogo voennogo naznacheniya // Izvestiya YuFU. Tekhnicheskie nauki. 2016. № 1(174). S. 156-168.
8. For A. Vospriyatie i raspoznavanie obrazov / Per. s fr. A.V. Seredinskogo; pod red. G.P. Katysa. M.: Mashinostroenie. 1989. 282 s.
9. Gorelik A.L., Skripkin V.A. Metody raspoznavaniya: Uch. posobie. 2-e izd., pererab. i dop. M.: Vyssh. shk., 1984. 208 s.
10. Adzhemov S.S., Tereshonok M.V., Klenov N.V., Chirov D.S. Metody raspoznavaniya vidov tsifrovoi modulyatsii signalov v kognitivnykh radiosistemakh // Vestnik Moskovskogo un-ta. Ser. 3. Fizika i Astronomiya. 2015. № 6. S. 19-27.
11. Khripunov S.P. Metody analitiko-evristicheskogo prognozirovaniya povedeniya protivnika v gruppovom vozdushnom boyu // Informatsionno-izmeritel'nye i upravlyayushchie sistemy. 2008. T. 6. № 7. S. 61-72.
12. Khripunov S.P., Demin A.N. Bortovaya intellektual'naya sistema prognozirovaniya povedeniya protivnika v gruppovom vozdushnom boyu v usloviyakh apriornoi neopredelennosti // Nelineinyi mir. 2014. T. 12. № 9. S. 38-44.
13. Khripunov S.P. Raspoznavanie takticheskikh situatsii v vozdushnom boyu s ispol'zovaniem metodov iskusstvennogo intellekta // Informatsionno-izmeritel'nye i upravlyayushchie sistemy. 2009. T. 7. № 4. C. 26-35.
14. Borisov V.V., Kruglov V.V., Fedulov A.S. Nechetkie modeli i seti. M.: Goryachaya liniya-Telekom, 2007. 284 s.
15. Adzhemov S.S., Klenov N.V., Tereshonok M.V., Chirov D.S. Ispol'zovanie iskusstvennykh neironnykh setei dlya klassifikatsii istochnikov signalov v sistemakh kognitivnogo radio // Programmirovanie. 2016. № 3. S. 3-11.
16. Khaikin S. Neironnye seti: polnyi kurs. M.: Izdatel'skii dom «Vil'yams», 2006. 1104 s.
17. Adzhemov S.S., Vinogradov A.N., Lebedev A.N., Makarenkov S.A., Tereshonok M.V., Chirov D.S. Metody intellektual'nogo analiza slabostrukturirovannykh dannykh i upravleniya kompleksami monitoringa. M.: Insvyaz'izdat, 2009. 210 s.
18. Luchin A.A., Trufanov E.Yu., Chirov D.S. Optimizatsiya neirosetevykh avtomatov pri klassifikatsii rasseivayushchikh ob''ektov po izmereniyam dvumernykh izobrazhenii // Neirokomp'yutery: razrabotka, primenenie. 2006. № 3. S. 32-39.
19. Garbuk S.V. Perspektivy primeneniya intellektual'nykh tekhnologii dlya resheniya zadach bezopasnosti // Natsional'naya bezopasnost' / nota bene. 2016. № 4. C. 451 - 457. DOI: 10.7256/2073-8560.2016.4.19207.
|
 Рус
Рус











