|
Электроника и электротехника
Правильная ссылка на статью:
Губанова А.А., Шибалкина Е.В.
Разработка системы обнаружения опасных объектов вблизи робота
// Электроника и электротехника.
2017. № 1.
С. 54-58.
DOI: 10.7256/2453-8884.2017.1.21289 URL: https://nbpublish.com/library_read_article.php?id=21289
Разработка системы обнаружения опасных объектов вблизи робота
Губанова Александра Анатольевна
преподаватель, Донской государственный технический университет.
344000, Россия, Ростовская область, г. Ростов-на-Дону, Гагарина, 1
Gubanova Aleksandra Anatol'evna
Lecturer at Don State Technical University.
344000, Russia, Rostovskaya oblast', g. Rostov-Na-Donu, Gagarina, 1

|
anatoliya81@mail.ru
|
|
 |
Другие публикации этого автора
|
|
|
Шибалкина Елена Владимировна
техник, Донской государственный технический университет
344000, Россия, Ростовская область, г. Ростов-на-Дону, Гагарина, 1
Shibalkina Elena Vladimirovna
Engineer at Don State Technical University
344000, Russia, Rostov-on-Don, Gagarina, 1
|
|
anatoliya81@mail.ru
|
|
 |
Другие публикации этого автора
|
|
|
DOI: 10.7256/2453-8884.2017.1.21289
Дата направления статьи в редакцию:
02-12-2016
Дата публикации:
08-04-2017
Аннотация:
Предметом исследования является робот, предназначенный для выполнения в составе мобильных комплексов (МК) задач, связанных с наличием опасных факторов, таких, например, как удаление и обезвреживание взрывоопасных предметов, работ в пространстве с высокими радиационными полями, в атмосфере агрессивных химических и биологических сред. Среди множества разнообразных типов мобильных роботов в настоящее время наибольший практический интерес вызывают колесные наземные мобильные роботы. В настоящее время формируется новый этап развития робототехники и автоматизации на основе микромеханики и нанотехнологий, появилась реальная возможность существенно повысить адаптационные возможности автоматизированных и автоматических систем и расширить сферы их применения. При управлении роботом применяется метод с независимым управлением поворотом каждого колеса влево или вправо Новизна исследования заключается в методе обнаружение подозрительных объектов (препятствий) вблизи себя и определения своих координат, а, следовательно, координат опасного объекта. Подозрительный объект обнаруживается и идентифицируется как опасный с помощью инфракрасного датчика, реагирующего на наличие препятствия. Организация управления мобильным роботом осуществляется посредством автоматизированной системы управления.
Ключевые слова:
опасный объект, мобильный робот, датчик, управляющий сигнал, устройство управления, приемник, передатчик, модуляция, двигатель постоянного тока, контроллер
Abstract: The research object is a robot designed for work as a part of mobile systems, and execution of tasks, involving hazardous factors, such as explosive objects removal and disposal, nuclear works or works in aggressive chemical and biological environment. Among a variety of types of mobile robots, wheeled ground mobile robots are of a particular practical interest nowadays. At the present time, a new stage of robotic technology and automatization, based on micromechanics and nanotechnologies, is developing; there is a real opportunity to significantly increase the adaptability of automatized and automatic systems, and extend the sphere of their application. Robots are controlled by the system of independent control of left and right wheel turn. The scientific novelty consists in the method of detection of suspect objects (obstacles) and the robot’s coordinates, and, consequently, the coordinates of the suspect object, by the robot. A suspect object is detected and identified as a hazardous object with the help of an infrared sensor reacting at the obstacle. Robots are controlled by automatic controlled systems.
Keywords: hazardous object, mobile robot, sensor, control signal, control device, receiver, transmitter, modulation, DC motor, controller
Автоматизированные системы управления мобильными объектами выполняют сложные операции по преобразованию информации, логические и арифметические действия, используя средства и методы вычислительной техники. Характерным признаком такой системы является многоконтурность, многосвязанность и вложенность системы управления с применением современных микроконтроллеров, микропроцессоров и микроЭВМ на любом уровне.
Рисунок 1- Структурная схема системы обнаружения опасных объектов
Мобильный робот предназначен для обнаружение подозрительных объектов (препятствий) вблизи себя и определения своих координат, а, следовательно, координат опасного объекта. Подозрительный объект обнаруживается и идентифицируется как опасный с помощью инфракрасного датчика, реагирующего на наличие препятствия.
Принцип работы. При обнаружении опасного объекта вблизи робота сигнал с датчика, через устройство усиления сигнала, подается на устройство управления. Устройство управления обрабатывает входную информацию и вырабатывает управляющий сигнал на останов двигателей. Если опасный объект не обнаруживается, то устройство управления синхронизирует работу двигателей правого и левого колес с целью прямолинейного движения робота. Синхронизация производится по информации, поступающей от датчиков угловой скорости колес робота.
Для задания траектории движения робота используется приемопередатчик, посылающий радиосигнал. Для обеспечения нормальной работы робота установлен инфракрасный датчик, предназначенный для нахождения препятствий на пути робота. Если на пути робота возникает препятствие, которое он не может преодолеть, то устройство управления вырабатывает сигнал на отработку поворота робота.
Также на мобильном роботе имеется приемник радиосигнала. На этот приемник от внешней системы управления будут поступать сигналы на поворот робота и на завершение работы. В данном случае поворот выполняется с целью изменения траектории движения по команде оператора.
Силовая часть схемы электрической принципиальной состоит из двух двигателей постоянного тока, четырех драйверов силовых ключей IR2112 и восьми силовых ключей BUZ11A.
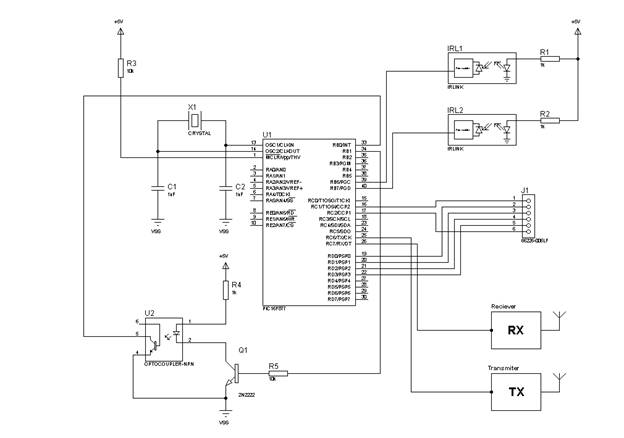
Рисунок 2- Фрагмент силовой схемы сиcтемы
Таким образом. для того, чтобы двигатели начали вращаться в одном направлении необходимо полностью открыть ключи Q1 и Q4. Если необходимо чтобы двигатель вращался в противоположном направлении, ключи Q1 и Q4 необходимо полностью закрыть и открыть Q2 и Q3. Для регулировки скорости вращения используется широтно-импульсная модуляция.
При разработке системы управления данного объекта возникает ряд проблем. Для поддержания постоянной линейной скорости транспортного средства необходимо отслеживать и перераспределять крутящий момент между ведущими колесами, т.е. программно реализовать механический дифференциал. Связанно это с тем, что при повороте, а так же вследствие некоторой разности в радиусах реальных колес, они оказываются неодинаково нагружены. Вследствие этого появляются паразитные силы, повышающие изнашиваемость ходовой части, и понижающие управляемость транспортного средства.
Для упрощения задачи, введем понятие некоторого эквивалентного колеса, которое будет находиться на оси ведущих колес на одинаковом расстоянии от них. Являясь эквивалентом передних колес, оно будет жестким, иметь идеальную геометрию и не будет вносить никаких помех в движение объекта. Таким образом, задача системы управления колесами будет сводиться к поддержанию постоянной угловой скорости эквивалентного колеса (обозначим ее как ωэкв).
Как видим, система управления должна измерять (рассчитывать) угловую скорость эквивалентного колеса. Но такого колеса в действительности нет, поэтому данную скорость необходимо подсчитывать по измеренным скоростям реальных колес, пользуясь следующей формулой приведения:
 , (1) , (1)
где: Kv – коэффициент корректировки угловых скоростей колес при криволинейном движении, зависящий от угла поворота рулевого колеса;
Kω – коэффициент дополнительного приращения скорости колеса.
Таким образом, измеренная угловая скорость эквивалентного колеса есть исходный сигнал, своего рода порог, с которым должна согласовать угловые скорости колес система управления. Принцип согласования достаточно простой: если оказывается, что измеренная угловая скорость одного из колес больше необходимой, то мощность подводимая к нему уменьшается. И наоборот. Другими словами система управления решает уравнение:
 (2) (2)
Точность регулирования должна быть не хуже +0.5% от ωэкв. И если угловая скорость какого-либо ведущего колеса выйдет из этой полосы регулирования, система управления прореагирует, изменив подводимую мощность к тому или иному колесу.
Определение дуги, которую проходит одно, например, правое колесо за время t:
 (3) (3)
где a=90 – угол, на который поворачивает робот, град.;
R=0.5 – радиус поворота, определяемый как расстояние между ведущими колесами робота, м.
Определение времени t:
 (4) (4)
где u=1 – скорость движения мобильного робота, м/с.
Т.о можно сказать, что мобильный робот выполняет поворот на 900 за 0,4с. При этом одно ведущее колесо затормаживается, а второе продолжает вращаться. за 0,4с. При этом одно ведущее колесо затормаживается, а второе продолжает вращаться.
Так же система управления дополнительно отрабатывает сигналы поступающие с датчика обнаружения опасных объектов и ультразвукового датчика, определяющего наличие препятствий на пути робота. Эта информация необходима для обеспечения безопасности движения мехатронной системы. Управление двигателями осуществляется с помощью широтно-импульсного преобразователя, встроенного в микроконтроллер.
Разработанная система управления мобильным роботом данная система имеет большие преимущества по сравнению с другими подобными СУ, и вполне конкурентоспособна на рынке аналогичных систем., так как требует меньших затрат на реализацию силовой части системы управления.
Библиография
1. Влахова А.В., Новожилов И.В. О заносе колесного экипажа при «блокировке» и «пробуксовке» одного из колес // Фундаментальная и прикладная математика. Т. 11, вып. 7, 2005. С. 11-20.
2. Мартыненко Ю.Г. Управление движением мобильных колёсных роботов // Фундаментальная и прикладная математика. Т. 11, вып. 8, 2005. С. 29-80.
3. http://фгос-игра.рф/news/smi/1059-inzhenernaya-kniga
References
1. Vlakhova A.V., Novozhilov I.V. O zanose kolesnogo ekipazha pri «blokirovke» i «probuksovke» odnogo iz koles // Fundamental'naya i prikladnaya matematika. T. 11, vyp. 7, 2005. S. 11-20.
2. Martynenko Yu.G. Upravlenie dvizheniem mobil'nykh kolesnykh robotov // Fundamental'naya i prikladnaya matematika. T. 11, vyp. 8, 2005. S. 29-80.
3. http://fgos-igra.rf/news/smi/1059-inzhenernaya-kniga
|
 Рус
Рус










